Temps (s) - Bibliothèque Centrale Université de Ouargla

REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
MINISTERE DE L’ENSEIGNEMENT SUPERIEUR
ET DE LA RECHERCHE SCIENTIFIQUE
Université KASDI Merbah Ouargla
Faculté Des sciences appliquées
Département de Génie Mécanique
Mémoire
Présenté en vue de l’obtention du diplôme de Master en Génie Mécanique
OPTION
Géni Energétique
PAR
GHETTAS Charaf Eddine
GHACHI Naoui
THEME
Etude et Simulation d’un véhicule hybride
moteur MCI et moteur Electrique
Devant le jury :
Président :
BENCHEIKH Kamel
M. A.(A)
U. Ouargla
Rapporteur :
KOURAS Sid-Ali
M. A.(A)
U. Ouargla
Examinateurs :
KHALFI Mehdi
M.A. (A)
U. Ouargla
Soutenu le :2016 /2015

Remerciements
« Je remercie dieu tous puissant qui m’a donné le
courage, la force et la volonté pour achever ce
modeste travail.
Nous tisons en premier lieu à exprimer mes sincères
remerciements à nos parents.
Mes sincères remerciements à mon directeur de
mémoire monsieur
KOURAS Sid-Ali prof à l’université KASDI
MERBAH OUARGLA pour sa patience, son soutien
et ses encouragements
continuels qui ont permis l’aboutissement de ces
efforts en dépit des difficultés rencontrées dans ce
travail.
Mes remerciements également à tous ceux qui m’ont
apporté leur aide De prés ou de loin à l’élaboration
de mon projet de fin d’étude.»

Dédicace
« Louange à Dieu, le seul et unique »
A notre très chers parents et notre frères et
sœurs,
A notre encadreur Mr. KOURAS Sid-Ali
A tous notre amis ,A tous ceux qui ont participé
de près ou de loin
à la réalisation de ce travail.

Table des matières
Introduction générale…………………………………………...…………………….……..2
Chapitre I : GENERALITE SUR LES VEHICULES HYBRIDES
1 . Introduction …………………………………………………………………………6
2 . Les différentes architectures hybrides…………………………..…………………6
3 . Les modes de fonctionnement: …………………………..…………………………6
a. Le Stop and Start ………………………………………………...………….6
b. Le mode régénération. ………………………………………….…..……….7
c. Le mode freinage récupératif. …………………………………………...….7
d. Le mode boost ……………………………………………………….……….7
e. Le mode alternateur. ………………………………………………….…….7
f. Le mode thermique pur ……………………………………………………..7
g. Le mode électrique pur ………………………………………………………7
4 . Types d’architectures : ……………………………………………………………8
a. Architecture parallèle………………………………………………………...8
b. Architecture micro-hybride………………………………………………….9
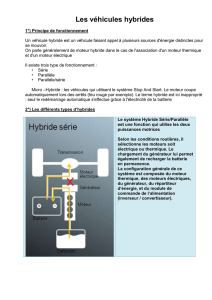
c. Architecture série : ………………………………………………………..10
d. Architecture combinée………………………………………………………11
e. Autres architecture………………………………………………………….12
5 . La problématique de contrôle optimal…………………………………………..12
6 . Minimisation de la consommation de carburant sur cycle normalisé…………13
7 . Problème en temps-réel où le futur n’est pas connu :………………………….16
8 . Définition des classes de problèmes d’optimisation étudiés……….……………16
9 . Conclusion : ………………………………………………………………………17
CHAPITRE II: MODELISATION NUMERIQUES& SIMULINK
Première partie SIMULINK
1. Introduction …………………………………………………………………19
2. Position du Problème………………………………………………………..19
3. Présentation de SIMULINK………………………………………………..20
4. Construction d’un diagramme SIMULINK……………………………….21

a) Lancer le logiciel / Ouvrir un fichier ……..……………….22
b) Sources de signaux…………………………………….…22
c) Visualiser des signaux …………………..………………….23
d) Simuler………………………………….…………………..24
e) Modéliser (Bases…)………………………...……………….24
f) Display (ou afficheur)……………………………………….25
Deuxième partie la modélisation
1. Etude thermodynamique du moteur MCI……...…………………………………26
2. Les données de base du moteur ……………………………………………..……..27
3. Les paramètres du moteur………………………………………...………………….28
4. Paramètre du temps d'admission….……………………………………………….28
5. Paramètre du temps de compression….…………………………………………...29
6. Paramètre du temps combustion….…….………………………………………….29
7. Paramètre du temps détente………..………………………………………………30
8. Etude du moteur électrique………..……………………………………………….31
a. Machine électrique asynchrones…………………………………..31
i. Stator……………………………………………..………………32
ii. Rotor bobiné…………………………………………..…………32
iii. Rotor à cage…………………………………………..………….32
iv. Rotor à double cage…………………………………...…………33
v. Rotor à encoches profondes…………………………...………..33
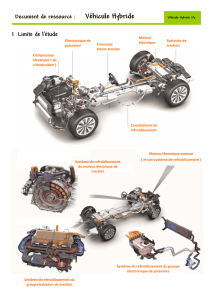
vi. Organes mécaniques (voir schémas ci-après)………………….33
b. Alimentation, caractéristiques et limites d’utilisation……………….34
i. Démarrage direct………………………………………………..34
i.1.Caractéristiques en régime permanent………………………………34
i.2.Caractéristiques en régime dynamique………….…..…………………35
c. Limitation du courant de démarrage………………………………...35
Démarrage étoile – triangle…………………………………………35
Insertion de résistances ou inductances statoriques………………35
Démarrage par autotransformateur………………………………36
Démarrage par gradateur de tension……………………………...36
Utilisation d’un onduleur de tension……………………………….36
d. Freinage des machines asynchrones………………………………..37
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
1
/
79
100%