Incertitudes expérimentales

,@=$@G6>3C6 C2?N@:D.2G:6C""/6E 62?#2C4((%(
Incertitudes expérimentales
A2CFrançois-Xavier BALLY
"J4O6"6@C3FD:6CF36CG:==:6CD
6EJean-Marc BERROIR
L4@=6?@C>2=6DFAOC:6FC6&2C:D
RÉSUMÉ
Cet article s’intéresse aux problèmes liés à l’évaluation des incertitudes expéri-
mentales que l’on peut rencontrer lors d’une séance de travaux pratiques, dans l’ensei-
gnement secondaire, en classes préparatoires ou à l’université. Issu d’un enseignement
en préparation à l’agrégation de physique, il est davantage centré sur la pratique que
sur des considérations théoriques. Les points suivants sont abordés : définition de l’in-
certitude expérimentale, étude statistique, propagation des incertitudes, modélisation et
vérification d’une loi physique. De nombreux exemples pratiques sont présentés.
INTRODUCTION
"2?@E:@?5^:?46CE:EF566DE6DD6?E:6==652?D=25O>2C4966IAOC:>6?E2=6)2?D6==6@?
?6A6FE;F86C56=2BF2=:EO5^F?6>6DFC656D2A6CE:?6?46@F56D24@>A2E:3:=:EO2G64
F?6=@:A9JD:BF66E2CE:4=6G:D6M7@FC?:C=6D@FE:=D?O46DD2:C6DM=^2?2=JD656CODF=E2ED
6IAOC:>6?E2FI%?J:?EC@5F:E5^23@C5=2?@E:@?5^:?46CE:EF56&F:D@?>@?EC64@>>6?E
M=^2:565^F?6OEF56DE2E:DE:BF6@?A6FEBF2?E:7:6C=6D:?46CE:EF56D2DD@4:O6D2F42C24EPC6
2=O2E@:C656DAC@46DDFD56>6DFC6%?>@?EC66?DF:E64@>>6?EOG2=F6C=^:?46CE:EF56DFC
F?68C2?56FC@3E6?F6A2C42=4F=MA2CE:C5^F?46CE2:??@>3C65^2FEC6D8C2?56FCD>6DF
CO6D ?7:? @? 23@C56 =6 AC@3=P>6 56 =2 >@5O=:D2E:@? 6E 56 =2 GOC:7:42E:@? 5^F?6 =@:
A9JD:BF6%?7@FC?:E=6D@FE:=D?O46DD2:C6DMF?62AAC@496BF2?E:E2E:G65646AC@3=P>6
2?DE@FD=6D42D=^2446?E6DE>:DDFC=2AC2E:BF66E56?@>3C6FI6I6>A=6D4@?4C6EDD@?E
ACOD6?EOD
1. ERREUR ET INCERTITUDE
62F4@FA 56 D4:6?E:7:BF6D 4@?7@?56?E 46D 56FI E6C>6D 6E A2C=6?E 56 42=4F=D 5^6C
C6FCD2F=:6F5642=4F=D5^:?46CE:EF56D
1.1. Erreurs
1.1.1. Définition de l’erreur
"@CD56=2>6DFC65^F?68C2?56FCA9JD:BF6x=^6CC6FC6DE=25:77OC6?466?EC6=2G2=6FC
U N I O N D E S P R O F E S S E U R S D E P H Y S I Q U E E T D E C H I M I E

?46CE:EF56D6IAOC:>6?E2=6D Le Bup ?V
>6DFCO6 x6E=2G2=6FCGC2:6XLa valeur vraie est en général inconnue AF:DBF^@?=2496C496
1.1.2. Erreurs aléatoires et erreurs systématiques
1.1.2.1. Erreurs aléatoires
"@CDBF^@?>6DFC6 =2 AOC:@565^@D4:==2E:@?5^F? A6?5F=6 6?@AOC2?E 2G64 F?49C@
?@>PEC6>2?F6=@?4@?DE2E6BF^6?COAOE2?E=6D>6DFC6D@?EC@FG656DCODF=E2ED=O8PC6
>6?E5:77OC6?ED5FDDFCE@FE2FIC6E2C5D565O4=6?496>6?EBF:G@?ECO5F:C6@F244C@REC6
=2G2=6FC56=2AOC:@56DF:G2?EBF^:=D@?E=:6F2F5O3FE@FM=27:?56=2>6DFC66A9O?@
>P?6D6C25OE64EOA2CF?6OEF56DE2E:DE:BF6%?A2C=65^6CC6FC2=O2E@:C6"6CODF=E2E56=2
>6DFC66DE42C24EOC:DO A2CF?6 5:DEC:3FE:@?56 AC@323:=:EO COA2CE:62FE@FC56=2G2=6FC
GC2:652?D=642D5^6CC6FCDAFC6>6?E2=O2E@:C6D
1.1.2.2. Erreurs systématiques
)FAA@D@?D>2:?E6?2?EBF^@?>6DFC6=2AOC:@565^@D4:==2E:@?5^F?A6?5F=62G64F?
49C@?@>PEC672FDDOBF::?5:BF6E@F;@FCD56DE6>AD EC@A72:3=6D"^OEF56DE2E:DE:BF6
?6=65OE64E6C2A2D%?A2C=65^6CC6FCDJDEO>2E:BF6 4^6DE=24@>A@D2?E656=^6CC6FCBF:
?6G2C:6A2D52?D56D4@?5:E:@?D56>6DFC6COAOEO6D&=FD8O?OC2=6>6?E=6D6CC6FCDDJDEO
>2E:BF6D@?E56D@C:8:?6D5:G6CD6D
®CC6FC5^OE2=@??286
Exemple :#""!$ 2EC@FGOF?6G2=6FC:?6I24E656=2492C8656=^O=64EC@?A2C46BF^:=
2G2:EAC:DF?6G2=6FC72FDD656=2G:D4@D:EO56=^2:C
®%F3=:5^F?A2C2>PEC6
Exemple :?7=F6?4656 =2 E6>AOC2EFC6 DFC =2G:E6DD65FD@?D:@??6ACO4:D6A2D=2
E6>AOC2EFC6:=6DE:>A@DD:3=6564@>A2C6C=2>6DFC6MF?6G2=6FC56CO7OC6?46
®&C@4O5FC66CC@?O6
Exemple :#6DFC65^F?6COD:DE2?46D2?DE6?:C4@>AE656DCOD:DE2?46D56=^2>APC6>PEC6
6E5FG@=E>PEC6Z
"6D6CC6FCDDJDEO>2E:BF6DD@?E5:77:4:=6DM5OE64E6Ca priori>2:DF?67@:D5OE64EO6D
@?A6FED@FG6?E=6D4@CC:86CA2C6I6>A=66?E6?2?E4@>AE656DCOD:DE2?46D56=^2>
APC6>PEC66E5FG@=E>PEC6=@CD56=2>6DFC65^F?6COD:DE2?46
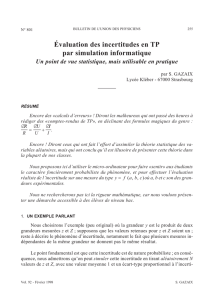
%?C6ACOD6?E64=2DD:BF6>6?E=6DCS=6DC6DA64E:7D56D6CC6FCD2=O2E@:C6D6EDJDEO>2E:BF6D
A2CF?62?2=@8:62G64F?E:CDFC4:3=6cf7:8FC6A2864:4@?EC6=646?EC656=24:3=6
C6ACOD6?E2?E=2G2=6FCGC2:656=28C2?56FCM>6DFC6C
] D:E@FD=6D:>A24EDD@?EAC@496D5F46?EC6 72:3=6D6CC6FCD2=O2E@:C6D6E72:3=66CC6FC
DJDEO>2E:BF6
] D:=6D:>A24EDD@?EECPDOE2=OD>2:D46?ECOD6?>@J6??6DFC=24:3=6 7@CE6D6CC6FCD
2=O2E@:C6D6E72:3=66CC6FCDJDEO>2E:BF6
U N I O N D E S P R O F E S S E U R S D E P H Y S I Q U E E T D E C H I M I E
&@FCD:>A=:7:6C=6D?@E2E:@?D52?DE@FE6=2DF:E6@?5OD:8?6A2C=2>Q>6=6EEC6x=28C2?56FCA9JD:BF66ED2
G2=6FC>6DFCO6
6DC2AA6=DO=O>6?E2:C6D56DE2E:DE:BF6DD@?EACOD6?EOD6?2??6I6

,@=$@G6>3C6 C2?N@:D.2G:6C""/6E 62?#2C4((%(
] D:=6D:>A24EDD@?E8C@FAOD>2:D=@:?5F46?EC6 72:3=6D6CC6FCD2=O2E@:C6D6E7@CE6
6CC6FCDJDEO>2E:BF6
] D:=6D:>A24EDD@?EOE2=OD6E=@:?5F46?EC6 7@CE6D6CC6FCD2=O2E@:C6D6E7@CE66CC6FC
DJDEO>2E:BF6
"6 5O72FE 56 46EE6 2?2=@8:6 6DE BF^6? 8O?OC2= 52?D =6D >6DFC6D A9JD:BF6D @? ?6
4@??2REA2D=646?EC656=24:3=6
Un exemple plus complexe :): @? >6DFC6 F?6 5:DE2?46 2G64 F?6 CP8=6 6? >OE2=
D@FA=6=27=6I:@?56=2CP8=6 G2 :?EC@5F:C6 F?6 6CC6FCDJDEO>2E:BF6=25:DE2?46=F66DE
E@F;@FCDEC@A8C2?566E2=O2E@:C6=27=6I:@?56=2CP8=66DEG2C:23=6
1.2. Incertitude
"^:?46CE:EF56 EC25F:E =6D E6?E2E:G6D D4:6?E:7:BF6D A@FC 6DE:>6C =^:>A@CE2?46 56
=^6CC6FC2=O2E@:C6 4@>>:D6 ? 23D6?46 5^6CC6FCDJDEO>2E:BF6 6==6 5O7:?:E F? :?E6CG2==6
2FE@FC56=2G2=6FC>6DFCO6BF::?4=FE=2G2=6FCGC2:62G64F??:G62F564@?7:2?465OE6C
>:?O"25OE6C>:?2E:@?56=^:?46CE:EF56?^6DEA2DD:>A=6a priori%?C6?4@?EC66?AC2E:
BF656FID:EF2E:@?D
®est évalué statistiquement : on parle alors d’évaluation de type A de l’incerti-
tude
%?496C49652?D4642DM42C24EOC:D6C=25:DEC:3FE:@?56AC@323:=:EO56DG2=6FCD56x
6?OG2=F2?E=6>:6FIA@DD:3=6=2G2=6FC>@J6??66E=^O42CEEJA65646EE65:DEC:3FE:@?
64: D6 72:E A2C =^2?2=JD6 DE2E:DE:BF6 5^F? 6?D6>3=6 56 >6DFC6D 56 x ACOD6?EO6 6?
5OE2:=2FA2C28C2A96?=^23D6?465^6CC6FCDJDEO>2E:BF6=^6DE:>2E:@?56=2G2=6FC
>@J6??66DE=2>6:==6FC66DE:>2E:@?56=2G2=6FCGC2:6XE2?5:DBF6=^:?46CE:EF56
5:C64E6>6?EC6=:O6M=^6DE:>2E:@?56=^O42CEEJA656=25:DEC:3FE:@?5O7:?:EF?:?E6CG2==6
52?D =6BF6= =2 G2=6FC GC2:6 56 XD6 EC@FG6 2G64 F? ?:G62F 56 4@?7:2?46 4@??F %?
49@:D:E=6A=FDD@FG6?E4@>>6:?46CE:EF56=^6DE:>2E:@?56=^O42CEEJA656=25:DEC:3F
E:@?%?A2C=62=@CD5^incertitude-type
®est évalué par d’autres moyens : on parle alors d’évaluation de type B de l’in-
certitude
):@??65:DA@D6A2D5FE6>AD?O46DD2:C6A@FC72:C6F?6DOC:656>6DFC6D@?6DE:>6
MA2CE:C56DDAO4:7:42E:@?D56D2AA2C6:=D56>6DFC6D6E56D4@?5:E:@?D6IAOC:>6?E2=6D
Exemple 1 :2?DF?66IAOC:6?465^:?E6C7OC6?46D2G64=6D76?E6D5^/@F?8@?>6DFC6
xδ
xδ
xδ
xδ
xδ
U N I O N D E S P R O F E S S E U R S D E P H Y S I Q U E E T D E C H I M I E
Figure 1 : (S=6DC6DA64E:7D56D6CC6FCD2=O2E@:C6D6EDJDEO>2E:BF6D

?46CE:EF56D6IAOC:>6?E2=6D Le Bup ?V
=25:DE2?46d56=^@C5C65F>PEC66?EC6=6D3:76?E6D6E=^O4C2?2G64F?6CP8=68C25FO6
6?46?E:>PEC6D%?6DE:>62=@CD8O?OC2=6>6?E=^:?46CE:EF56EJA6 DFC=2>6DFC6M
56 8C25F2E:@? E D: @? FE:=:D6 F?6 CP8=6 8C25FO6 6? >:==:>PEC6D O4:56C 5^F?6
:?46CE:EF56EJA6 O82=6 M >> D6C2:E :==FD@:C6 6? 6776E 2F 7FC 6E M >6DFC6 BF6 =2
ACO4:D:@?5^277:4928656=^:?DECF>6?E2F8>6?E6:=72FE244C@REC6=^2?2=JD656D42FD6D
5^6CC6FC:?D:52?D=642DACOD6?E=2A@D:E:@?56=23:76?E6A=24O652?DD@?DFAA@CE6DE
5:77:4:=6 M C6AOC6C ACO4:DO>6?E M =^O496==6 5F >:==:>PEC6 2=@CD BF^6==6 OE2:E 724:=6 M
C6AOC6CM=^O496==65F46?E:>PEC6
Exemple 2 - Utilisation d’un voltmètre numérique : ? @FGC2?E =2 ?@E:46 5^F? G@=E
>PEC6?F>OC:BF6@?EC@FG6EJA:BF6>6?E=6D:?5:42E:@?DDF:G2?E6D =2ACO4:D:@?D56
=2>6DFC6 6DE 5@??O6A2CW 7@:D=656C?:6C5:8:E W 56=2G2=6FC=F6%?A6FE
4@?D:5OC6CBF6=^:?5:42E:@?5@??O6A2C=6723C:42?E256FI@C:8:?6D
] 6==6BF:AC@G:6?E5^F?66CC6FC5642=:3C286G2C:23=65^F?2AA2C6:=M=^2FEC65^F?
42=:3C6M=^2FEC6Z6EE66CC6FC6DEDJDEO>2E:BF6BF2?5@?FE:=:D6=6>Q>642=:3C6
5^F? >Q>6 2AA2C6:= ==6 56G:6?E 2=O2E@:C6 BF2?5 @? FE:=:D6 A=FD:6FCD 42=:3C6D @F
A=FD:6FCD2AA2C6:=D>Q>656>@5P=6D:56?E:BF6D==66DE6DD6?E:6==6>6?EACOD6?E6
52?D=6DW 56=2G2=6FC=F6
] 6==6 BF: AC@G:6?E 5^6CC6FCD 2=O2E@:C6D 3CF:EZ ==6 6DE 6DD6?E:6==6>6?E ACOD6?E6
52?D=6DW 7@:D=656C?:6C5:8:E
&@FCOG2=F6C=^:?46CE:EF56EJA6DFCF?6>6DFC6@?AC@4P56MF?6OG2=F2E:@?56EJA6
%?4@?G:6?E565:G:D6C=2ACO4:D:@?D:?5:BFO6A2C=6723C:42?EA2C
1.3. Présentation d’un résultat expérimental
"^O4C:EFC6C2AA@CE2?E=2>6DFC65^F?68C2?56FCA9JD:BF6x6DE
@T 6DE =2 >6:==6FC6 6DE:>2E:@? 56 =2 G2=6FC GC2:6 X6E =^:?46CE:EF56EJA6 DFC =2
>6DFC6:?46CE:EF5623D@=F6
?=^23D6?465^6CC6FCDDJDEO>2E:BF6D=2G2=6FCGC2:656xD6EC@FG6AC@323=6>6?E
52?D@FAC@49656=^:?E6CG2==62==2?E56 M %?5O7:?:E2FDD:=^:?46CE:EF56
EJA6C6=2E:G6@F7C24E:@??2:C6
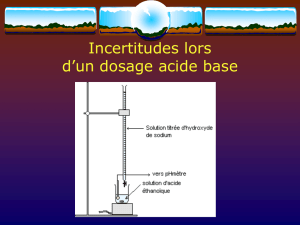
Exemple :2?DF?66IAOC:6?465^@?56DDE2E:@??2:C6D6?24@FDE:BF6@?>6DFC6=25:DE2?46
xδ
3
xx xvaleur mesurée de !δ=
x
xδ
xx–δ
xxδ+
/xxδ
U N I O N D E S P R O F E S S E U R S D E P H Y S I Q U E E T D E C H I M I E
&@FC7@C>2=:D6C46CODF=E2E@?A6FEDFAA@D6CBF6=2COAOE:E:@?56=2>6DFC64@?5F:C2:EMF?65:DEC:3FE:@?56
AC@323:=:EOF?:7@C>646?ECO6DFC=2G2=6FCGC2:66E5656>:=2C86FC 4>"642=4F=56=^O42CEEJA65646EE6
5:DEC:3FE:@?5@??6F?6:?46CE:EF56EJA656
cfA2C28C2A96
@>>652?D=642D56=2CP8=646=2C6G:6?EMDFAA@D6CF?65:DEC:3FE:@?56AC@323:=:EOF?:7@C>656=2C86FC
D
,/ ,053029cm=

,@=$@G6>3C6 C2?N@:D.2G:6C""/6E 62?#2C4((%(
6?EC6 D6AE ?\F5D 56 AC6DD:@? @? EC@FG6 >> 2G64 F?6 :?46CE:EF56EJA6 23D@=F6
6DE:>O6M >>A2C46BF^@?25F>2=MC6AOC6CACO4:DO>6?E=6D?\F5D[=242=4F=2
EC:46@?@3E:6?EA@FC=2=@?8F6FC 5^@?56 6E A@FC =^:?46CE:EF56EJA623D@=F6=6DCODF=E2ED
DF:G2?ED >>6E >>
®@>AE6 E6?F 5F ?@>3C6 56 49:77C6D D:8?:7:42E:7D 56 =2 >6DFC6 :?:E:2=6 @? 82C56
®"^:?46CE:EF56EJA6OE2?EE@F;@FCDOG2=FO68C@DD:PC6>6?E@?82C56F?M56FI49:77C6D
D:8?:7:42E:7D
®"656C?:6C49:77C6D:8?:7:42E:756=2>6DFC65@:EQEC64@9OC6?E2G64=^:?46CE:EF56EJA6
@?O4C:C25@?4
G2=6FC>6DFCO656 6EG2=6FC>6DFCO656
1.4. Comparaison entre valeur mesurée et valeur acceptée
J2?E@3E6?F=2G2=6FC>6DFCO62G64D@?:?E6CG2==65^:?46CE:EF56@?=24@>A2C6M
=2 G2=6FC 56 CO7OC6?46 A@FC F?6 G2=6FC 6IAOC:>6?E2=6 56 CO7OC6?46 ?6 A2D A2C=6C 56
G2=6FC6I24E6A2C=6C56valeur tabulée=?^6DEA2D2?@C>2=BF6=^:?E6CG2==6?64@?E:6??6
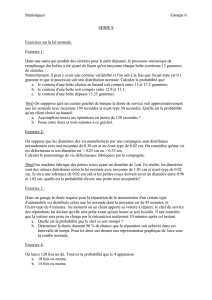
A2D=2 G2=6FC 56 CO7OC6?46:?D: 52?D=6 42D 7COBF6?E5^F?6 5:DEC:3FE:@? 82FDD:6??6=6
E23=62F 5@??O6?2??6I6>@?EC6BF^:= J2 56492?46DD@:E 6?G:C@?F?6492?46
DFCEC@:D5^QEC652?D4642D%?4@>>6?46C2M5@FE6C56=2>6DFC6=@CDBF6=^O42CE2EE6:?E
A=FD56 AC@323:=:EOBF6=2>6DFC6D@:E3@??6 F?6492?46DFCG:?8E2F56=M56
6EF?6492?46DFC46?E2F56=M56 A@FC F?6 5:DEC:3FE:@? 82FDD:6??6 ):4^6DE=6
42D:=72FE:?G@BF6C56D6CC6FCDDJDEO>2E:BF6D
Exemple pratique : %?>6DFC6=2G:E6DD65FD@?52?D=^2:CM V%?67764EF6F?6
DOC:656>6DFC6DBF:4@?5F:EM 6EMF?6:?46CE:EF56EJA6 %?
25@?4 "2G2=6FCE23F=O6:?5:BF6M46EE6E6>AOC2EFC6
==66DE6?569@CD5F5@>2:?65^:?46CE:EF56>2:D=^O42CE6?EC66EG2FE
"2E23=65@??O66?2??6I6A2C28C2A96:?5:BF6BF^:=J26?G:C@?F?6492?46DFC5:I
A@FC BF^F? O42CE DFAOC:6FC @F O82= M D6 AC@5F:D6 %? A@FCC2 4@?D:5OC6C BF6 =2
>6DFC6 6DE G2=:56 >2:D ?O2?>@:?D A2D ECPD D2E:D72:D2?E6 = ?^6DE A2D A@DD:3=6 56 E6?:C
4@>AE6 56D 6CC6FCD DJDEO>2E:BF6D 52?D F? 42=4F= 5^:?46CE:EF56 4^6DE A@FCBF@: @? =6D
DFAA@D6C2?O8=:8623=6DBF:EE6MC6G6?:CM=27:?DFC46EE6DFAA@D:E:@?6?42D565OD244@C5
6?EC6=2G2=6FCEC@FGO66E=2G2=6FCE23F=O6
,287 3 mmλ=
7mmδλ =
287 7 mm!λ=
%287 2!λ=
xδ
xδ
xδ
v335 m s 1–
$=
v5m s 1–
$δ=
v335 5 m s 1–
!$=
v343 m s 1–
$=
vδ
vδ
U N I O N D E S P R O F E S S E U R S D E P H Y S I Q U E E T D E C H I M I E
A contrario=672:E56EC@FG6CF?3@?244@C5?6AC@FG6A2DBF^:=?^J2A2D5^6CC6FCDJDEO>2E:BF6 :=A6FE
J6?2G@:CA=FD:6FCDBF:D64@>A6?D6?E
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
1
/
25
100%