Informatique en PCSI et MPSI Champollion 2013

A. Hassan@Champollion PCSI-MPSI – 1
Informatique en PCSI et MPSI
Champollion 2013-2014
Méthodes d’Analyse Numériques
Implémentation et Application en Python
Intégration Numérique
A. HASSAN
23 avril 2014

Intégration Numérique (Quadrature)
Intégration Numérique
(Quadrature)
L’intégration : une histoire
d’Aire
L’intégration : une
Histoire d’Aire
Introduction
Pourquoi l’intégration
numérique?
Le problème
Le Problème (suite)
Polynômes d’interpolation
de Lagrange
Méthodes Élémentaires de
Quadrature (de
Newton-Cotes)
(Suite)
(suite)
Méthodes d’ordre zéro:
Exemple des Rectangles
gauches
Méthodes d’ordre zéro:
Rectangles Droits
Méthodes des Rectangles
Milieux
Implémentation en
Python (à compléter)
Implémentation en Python
Méthode des rectangles:
Calcul de l’erreur
Rectangle des milieux:
Calcul de l’erreur
Méthodes d’ordre un:
méthode des Trapèzes
Méthode des Trapèzes:
Calcul de l’erreur
Méthode d’ordre 2:
S
A. Hassan@Champollion PCSI-MPSI – 2

L’intégration : une histoire d’Aire
A. Hassan@Champollion PCSI-MPSI – 3
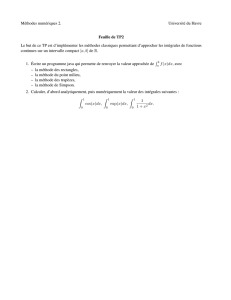
a2
carrée a.b
rectangle
1
2ab
triangle rectangle
b
a
triangle quelconque : s=1
2a.b
Aire par Triangulation

L’intégration : une Histoire d’Aire
A. Hassan@Champollion PCSI-MPSI – 4
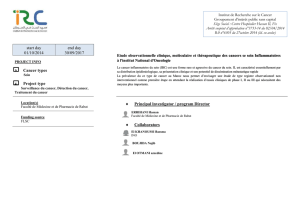
Le cas des contours courbés
a
b
Cf
1
2
3
-1 1 2 3-1-2
a
b
Cf
−−−−−→
n→+∞
Aire =
b
R
a
f(x)dx
a
b
Cf

Introduction
A. Hassan@Champollion PCSI-MPSI – 5
Intégrale (de Riemann) sur un segment :fest intégrable sur [a;b], ssi pour toute
subdivision σn= ( x0
|{z}
=a
< x1<···< xn
|{z}
=b
)les sommes ci-dessous convergent
i=n−1
X
i=0
(xi+1−xi)f(ti)∀ti∈[xi;xi+1]
−−−−−−−−−→
n→+∞L
noté
x=b
Z
x=a
f(x)dx
Théorème fondamental de l’Analyse :
Soit fcontinue sur [a;b]et Fune primitive de falors :
b
Z
a
f(t)dx=F(b) − F(a)
Le calcul d’une intégrale devient un calcul de primitive que l’on peut
exprimer, si possible, à l’aide des fonctions élémentaires et leurs composées.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
1
/
35
100%