Systèmes Asservis: Exemples et Régulation de Vitesse

CHAPITRE
2
EXEMPLES
DE
SYSTEMES ASSERVIS
2.1. SYSTÈMES
(NATURELLEMENT}
BOUCLÉS
Sans vouloir absolument voir
des
systèmes asservis partout,
on
constate
que de
très nombreuses fonctions naturelles (humaines, animales, équilibres
naturels,...)
ont une
structure
de
type
bouclé.
On
peut
citer
toutes
les
régulations,
très
sophistiquées,
dont nous
bénéficions
en
tant
qu'êtres
humains
:
circulation sanguine, oxygénation, régulation
de
température, équilibre chimique
du
corps,
etc ... En
voici quelques exemples.
*
Maintien
de la
station debout chez
VHomme
Le
maintien
de la
station debout chez l'Homme s'effectue
en
créant
un
certain
tonus
aux
muscles dits
de
posture. Cela exige
un
contrôle
car si ce
tonus était commandé
en
chaîne ouverte, nous serions déséquilibrés
par un
coup
de
vent.
Automatique
-
S.A.L.
chapitre
2 :
Exemples
de
Systèmes
Asservis
© [A. JUTARD M.BETEMPS], [1997], INSA de Lyon, tous droits réservés.

Ce
contrôle
s'effectue
grâce
au
cervelet,
qui
reçoit constamment
sur le
tonus
des
muscles
de
posture
des
informations sous forme d'influx nerveux issus
de
détecteurs
de
tension situés dans
ces
muscles.
Si le
corps
s'incline
en
arrière,
ces
détecteurs signalent
au
cervelet
le
raccourcissement
des
muscles postérieurs
et
l'étirement
des
muscles
antérieurs
du
corps
; le
cervelet commande
une
nouvelle répartition
de
tonus pour
rétablir
l'équilibre
menacé.
En
somme,
le
tonus musculaire
est
asservi
à la
valeur
qui
maintient
la
station verticale. Cette régulation étant normalement inconsciente,
on
peut
parler
de
contrôle automatique.
Ce
contrôle
est
doublé
par
l'oreille
interne
qui est
également
le
siège
de
l'équilibration
;
cette redondance
du
couple
cervelet-oreille
interne permet
de
compenser
les
faiblesses
de
l'un
ou
l'autre
de ces
organes
de
l'équilibre.
Ce
système
est
purement
naturel
et
inconscient.
*
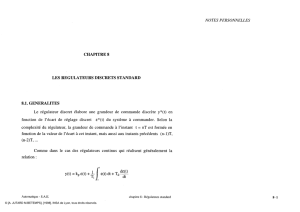
Pilotage
humain
Dans
le cas du
pilotage (automobile, avion) l'homme rentre dans
la
boucle
et
assure lui-même
un
grand
nombre
de
fonctions
:
mesure
et
rétroaction, détection
d'erreur, interprétation (traitement
du
signal), amplification, pré-amplification
de
puissance.
Le
pilotage humain peut être schématisé selon
les
diagrammes
ci-dessous
:
Automatique
-
S.A.L.
chapitre
2 :
Exemples
de
Systèmes Asservis
© [A. JUTARD M.BETEMPS], [1997], INSA de Lyon, tous droits réservés.

*
Acheminement
du
courrier
Quelques organisations fonctionnelles
de nos
sociétés sont
des
exemples
de
gradation
dans
la
notion
de
contrôle. L'acheminement
du
courrier permet d'illustrer
ceci
:
•
envoi
d'une
lettre
déposée
dans
une
boite
aux
lettres
:
système
de
commande
en
chaîne ouverte (pas
de
contrôle
officiel),
renvoi
d'une
lettre recommandée
:
système
de
commande,
à
contrôle éventuel,
toujours
possible.
•
envoi
d'une
lettre recommandée avec accusé
de
réception
:
système
de
commande avec boucle
de
retour,
à
contrôle certain.
Automatique
-
S.A.L.
chapitre
2 :
Exemples
de
Systèmes
Asservis
© [A. JUTARD M.BETEMPS], [1997], INSA de Lyon, tous droits réservés.

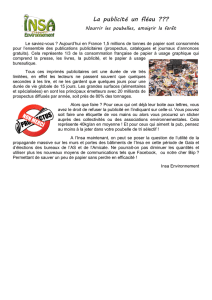
*
Moteur
à
courant continu
Parmi
les
objets technologiques,
on a
étudié
(cours
de
Mécatronique
-
3ème
partie
-
chapitre
3) le
moteur
à
courant continu commandé
par sa
tension d'induit
et
constaté
que
son
modèle conduisait
à un
diagramme fonctionnel
de
type bouclé
;
C'est
un
système
auto-régulé.
Les
quelques exemples
que
nous venons
de
citer montrent qu'une observation
attentive
de la
Nature,
du
Monde Animal,
des
institutions humaines,
de
certains objets
manufacturés
plus
ou
moins sophistiqués, .... nous
fait
découvrir
que la
notion
de
rétroaction,
qui
permet
le
contrôle permanent
de
l'exécution
d'un
ordre,
est
omniprésente dans notre univers.
Automatique
-
S.A.L.
chapitre
2 :
Exemples
de
Systèmes Asservis
© [A. JUTARD M.BETEMPS], [1997], INSA de Lyon, tous droits réservés.

Cependant,
ces
systèmes
auto-régulés
par
essence
(en
particulier ceux relevant
de la
Technique)
ne
présentent
pas
toutes
les
garanties
de
fonctionnement souhaitées
par
leurs concepteurs
et
leur asservissement doit être spécialement étudié, pour
les
rendre
tout
à
fait
performants.
//
faut donc contrôler
effectivement
la (ou
les) grandeur
de
sortie,
en
adjoignant
au
système
un (ou
des) capteur
de
mesure,
et
utiliser
ce (ou
ces)
signal
pour comparer
en
permanence
Vexécution
de
Vordre
à
celui-ci
; le
système
est
alors
prévu pour
réagir
automatiquement
à
tout écart constaté.
2.2. QUELQUES EXEMPLES
DE
SYSTÈMES
(VOLONTAIREMENT)
ASSERVIS
2.2.1.
Asservissement électrique
On
a
déjà
constaté
le cas où la
boucle
de
réaction était absolument nécessaire
pour pouvoir utiliser convenablement
un
amplificateur opérationnel
(cours
de
Mécatronique
-
lère
partie
-
chapitre
1).
Dans
ce
cas,
leprincipe
d'inversion
s'applique totalement
et la
fonction
de
transfert
de
l'ensemble
ne
dépend
que de
l'impédance d'entrée
et de
l'impédance
de
bouclage.
2.2.2.
Asservissements électromécaniques
Ce
type d'asservissement
est
extrêmement courant. Nombre
de
systèmes
mécaniques utilisés dans
l'Industrie,
dont
la
commande
est de
nature électronique
et/ou
Automatique
-
S.A.L.
chapitre
2 :
Exemples
de
Systèmes Asservis
© [A. JUTARD M.BETEMPS], [1997], INSA de Lyon, tous droits réservés.
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%