Les régulateurs discrets

CHAPITRE
8
LES
REGULATEURS DISCRETS STANDARD
8.1. GENERALITES
Le
régulateur discret élabore
une
grandeur
de
commande discrète
y*(t)
en
fonction
de
l'écart
de
réglage discret
£*(t)
du
système
à
commander. Selon
la
complexité
du
régulateur,
la
grandeur
de
commande
à
l'instant
t = nT est
formée
en
fonction
de la
valeur
de
l'écart
à cet
instant, mais aussi
aux
instants précédents (n-l)T,
(n-2)T,...
Comme dans
le cas des
régulateurs continus
qui
réalisent généralement
la
relation
:
y(t)
=
kpe(t)
+
Jr|
e(t)dt
+
Td^
J 0
Automatique
-
S.A.E.
chapitre
8 :
Régulateurs
standard
© [A. JUTARD M.BETEMPS], [1998], INSA de Lyon, tous droits réservés.

on
crée
des
régulateurs
discrets
standard
qui
traduisent
en
valeurs discrètes cette
expression.
Les
régulateurs
les
plus courants sont
du
type
:
P.I,
P.D,
P.LD,
voire
P.D2
et
P.LD2.
Si
l'action Proportionnelle
P est des
plus simples,
les
actions intégrale, dérivée
et
dérivée-double méritent
une
certaine attention.
8.2.
LES
DIFFERENTES ACTIONS
8.2.1.
Action intégrale
I
Le
régulateur
I
intègre
l'écart
de
réglage
en
fonction
du
temps. Cependant, dans
le
domaine
des
régulateurs discrets, l'intégration
est
remplacée
par une
sommation
de
l'écart
de
réglage discret £*(t).
En
toute rigueur,
on
devrait donc parler
de
régulateur-
sommateur...
équation
discrète
:
yi(nT)=
Ki£
£
GT)
Ki
=
i
j
=
0
M
équation
récurrente
:
Automatique
-
S.A.E.
chapitre
8 :
Régulateurs standard
NOTES
PERSONNELLES
© [A. JUTARD M.BETEMPS], [1998], INSA de Lyon, tous droits réservés.

y1(nT)
=
y1[(n-l)T]
+
Kie(nT)
pour plus
de
commodité,
on
posera,
à
l'instant
considéré
:
y1
=
yÏ!
+
K;
e
fonction
de
transfert
:
C(v)
_
yj(z)
_
K.
z
_K.
i
C'(Z)-e(z)-K'z-l-Kli-z-i
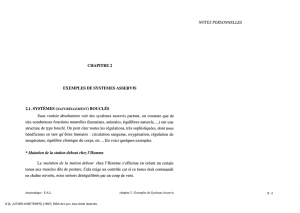
diagramme
structurel
:
A
l'aide
de
l'équation récurrente
(forme
récursive)
et en
observant
que le
bloc
z"1
introduit
le
décalage
de
y1
en
y^,
on
peut représenter
la
relation
qui lie
y1
à 8 par le
schéma ci-après, appelé diagramme structurel
qui met
bien
en
évidence
la
mise
en
mémoire
de la
valeur
de la
grandeur
y
afin
de
l'utiliser
à la
période suivante
:
NOTES
PERSONNELLES
© [A. JUTARD M.BETEMPS], [1998], INSA de Lyon, tous droits réservés.

NOTES
PERSONNELLES
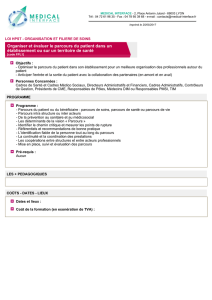
8.2.2.
Action dérivée
D
L'action dérivée
se
traduit
par un
terme proportionnel
à la
différence
des
écarts
de
réglage
aux
instants d'échantillonnage
nT et
(n-l)T.
équation
discrète
:
yd(nT)
=
Kd[£(nT)-e[(n-l)frD
avec
Kd
=
^
soit
yd
=
Kd[£-£_i]
fonction
de
transfert
:
Cd(Z)
=
^
=
Kd^
=
Kd(l-z-i)
8(Zj
^
diagramme
structurel
:
© [A. JUTARD M.BETEMPS], [1998], INSA de Lyon, tous droits réservés.

8.2.3.
Action dérivée-seconde
D2
Soit
le cas où le
régulateur comporte
un
terme
en
dérivée- seconde,
du
type
:
d2e(t)
dt2
L'action
dérivée-seconde discrète
s'approxime
par un
développement limité
au
deuxième ordre
de
l'écart
£*(t),
d'où
la
relation explicite liant l'écart
aux
instants
nT,
(n-l)T
et
(n-2)T
à la
grandeur
de
sortie
yd2(nT).
équation
discrète
:
yd2
(nT)
=
Kd2
[e
(nT)
- 2e
[(n-1
)T] + e
[(n-2)T]]
2
avec
Kd2
= —
T2
Soit
:
yd2
=
Kd2
[e
-28.!
+
e
2]
fonction
de
transfert
:
Cd2(z)
=
^f=Kd2(l-2z-i+Z-2)
t^Zj
Automatique
-
S.A.E.
chapitre
8 :
Régulateurs
standard
NOTES
PERSONNELLES
© [A. JUTARD M.BETEMPS], [1998], INSA de Lyon, tous droits réservés.
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%