Document

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I.6
GENERALITES SUR L’AMORTISSEMENT
1. Introduction
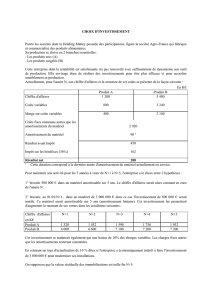
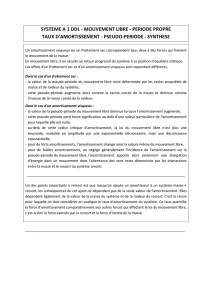
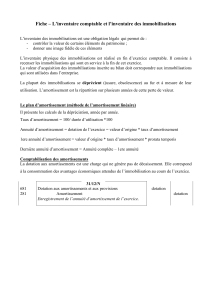
Les vibrations dans un système mécanique [106, 130, 164] résultent d’un transfert
alternatif entre énergies cinétique et potentielle qui, sans dissipation, perdure Figure(1-a). En
présence de dissipation, et c’est le cas de tout système réel, les amplitudes du mouvement
convergent jusqu’à l’équilibre dynamique dans le cas d’un système forcé, jusqu’à l’équilibre
statique dans le cas d’un système libre.
Un amortissement visqueux crée une force proportionnelle et opposée à la vitesse alors
qu’un frottement sec crée une force constante mais change de signe à chaque demi-cycle et
donc s’oppose à la vitesse [73, 137].
Position d’équilibre
Position de mouvement Temps
a- Poutre non amortie
Enveloppe We(t)
Temps
Amortisseur visco
b- Poutre avec amortissement visco
Temps
Amortisseur en friction
c- Poutre avec amortissement sec
Fig.1. Poutre en mouvement libre [ 137].
Dans le cas d’une réponse impulsion le mouvement alternatif s’inscrit dans une courbe
enveloppe exponentielle décroissante, Figure (1-b), en présence d’amortissement visqueux,
linéaire décroissante, Figure (1.-c) en présence d’amortissement sec. Ainsi le mouvement d’un

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I.7
système avec amortissement visqueux pur prend théoriquement un temps infini pour mourir
complètement. Mais dans la pratique un système réel cumule différents types d’amortissement
qui ne dépendent pas exclusivement de la vitesse et qui contribuent donc à l’étouffement
complet du mouvement [98, 99, 109, 135]. Pour les systèmes à plusieurs degrés de liberté
l’amortissement étouffe avec le temps les modes de fréquences les plus élevées. Ainsi au bout
d’un certain temps le mouvement ne comportera que le mode fondamental permettant la
mesure de l’amortissement par décrément logarithmique dans le cas d’amortissement visqueux
et d’hystérésis pouvant être décrit par un module d’Young complexe.
En régime harmonique, un système à un degré de liberté se comporte en raideur en deçà
de sa fréquence propre, en inertie au delà. En l'absence d’amortissement aucun équilibre
dynamique ne peut être atteint à la résonance [23, 84, 67]. Dans la pratique et donc en présence
d’amortissement, l’amplitude de l’équilibre dynamique dépend de l’importance des forces
d’amortissement. La mesure de l’amortissement s’opère alors par la mesure de bande. Là aussi
la mesure d'amortissement sera unique pour certains types d'amortissement, tels que visqueux
ou d’hystérésis, mais dépendra de l'amplitude pour d'autres types d'amortissement, tels que le
frottement sec, et doit donc être employée avec une certaine attention.
2. Amortissement externe à la structure
L’amortissement externe est apporté par le fluide environnant [26], le contact avec une
autre structure ou un système mécanique
2.1 Rayonnement acoustique
Un milieu fluide environnant (air, l'eau, huile, ou d'autres gaz ou liquides) modifie la
réponse vibratoire d'une structure [21, 73].
2.1.1 Piston dans un tube
L'effet d'amortissement du milieu fluide dépend de plusieurs facteurs, dont la densité '
ρ
du milieu, la vitesse de propagation des ondes dans le milieu, et les caractéristiques de masse et
de rigidité de la structure elle-même [26, 133, 137]. Un système très simple, une masse
soutenue par des ressorts de raideur k agissant comme un degré de liberté
()
tw couplé sur
chaque extrémité à un milieu acoustique permet d’illustrer les principes mis en œuvre.
L'équation du mouvement de la masse m est
()
a
FtFkw
dtwd
m−=+
2
2,(1)

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I.8
où a
F est la force due au milieu acoustique. Elle est déterminée en résolvant l'équation du
mouvement du milieu acoustique, la masse oscillant avec la vitesse
()
tw
. L'équation du
mouvement à satisfaire est l'équation d'ondes unidimensionnelle:
0
1
2
2
22
2=− dt
d
adx
d
ψψ
.(2)
Dans cette équation a est la célérité de l’onde dans le milieu et
ψ
le potentiel vitesse dans
le milieu liquide, qui est lié à l'incrément de pression p et à la vitesse acoustique V par les
relations suivantes:
dt
d
p
ψ
ρ
'−= , et dx
d
V
ψ
=.(3)
Si le déplacement de la masse m est
()
ti
Wetw
ω
=, alors nous pouvons supposer que
()
tx,
ψ
est
de la forme
()
ti
ex
ω
Ψ, de sorte que la force Fa devient
()
waRppRF LRa
'2
22
ρππ
=−= ,(4)
par conséquent l'équation (1) prend la forme :
()
tFkw
dt
dw
aR
dt
wd
m=++ '2 2
2
2
ρπ
,(5)
si maintenant
()
ti
FetF
ω
=, alors:
()
2
1
1
ωη
mik
F
W
e
−+
=,(6)
où
kaR
e
ωρπ
η
'2 2
=,(7)
est le facteur de perte efficace du système à un seul degré de liberté. Il est proportionnel à
ω
: et
à la densité du milieu '
ρ
: ainsi ce type d'amortissement est plus efficace aux fréquences
élevées et dans un milieu type liquide (eau, huile) plutôt que type gaz (air).
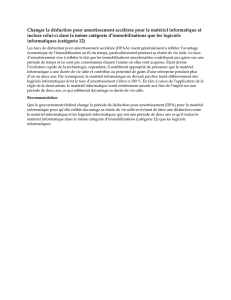
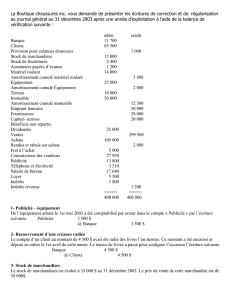
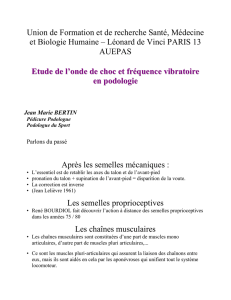
2.1.2 Amortissement acoustique d’une plaque
Le problème de prévoir l'effet d'un milieu acoustique sur la réponse d'une plaque est plus
compliqué que le cas précédent. Un élément de la plaque vibrant au point A, Figure 2, met en
mouvement le milieu acoustique et produit des ondes qui, en se propageant, créent des
pressions au point B.

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I.9
θ
0
θ
r0
r’
r
o
ds
X
γ
A
B
Fig.2. Amortissement acoustique
En champ libre, la pression est donnée par la formule de Rayleigh [137, 161]:
()
()
∫−−
−= S
arti dSe
r
rwi
p'
'
,
2'
ω
θ
π
ωρ
,(8)
où S est la surface totale de la plaque,
()
ti
erw
ω
θ
,
la vitesse du plat au point B, et r' est la
distance de B à A donnée par
()
00
22
0cos2'
θθ
−−+= rrrrr . L’équation générale du
mouvement d'une plaque avec un milieu acoustique s’écrit en employant l'équation (1):
() ()
θθρ
ω
,,
2
2
4rperF
dtwd
HbwD ti −=+∇ ,(9)
où D est la constante de rigidité des plaques, H l’épaisseur, b la largeur,
ρ
la masse volumique
de la plaque. C'est une équation intégrale-différentielle qui peut être résolue, par exemple, par
analyse modale.
2.2 Piston de compresseur
Le fluide dans lequel une structure est immergée peut fournir d'autres mécanismes
d'amortissement comme la fuite de gaz [137]. Un piston comprimant alternativement un
volume de gaz fermé hermétiquement crée un incrément de pression ti
pe
ω
∆ proportionnel au
mouvement du piston
()
ti
eyxW
ω
, et aucune dissipation ne se produit. Si une petite fuite
survient, l'incrément de pression se modifie :
()
εω
+
∆
ti
pe , où
ε
est un angle de phase résultant de
la perte. L’écoulement de la fuite peut avoir un régime laminaire ou turbulent, selon
l’amplitude W, le volume du gaz 0
V, la taille de la fuite, et le type de mode dans lequel le
panneau répond.

CHAPITRE I – GENERALITES SUR L’AMORTISSEMENT
PARTIE I.10
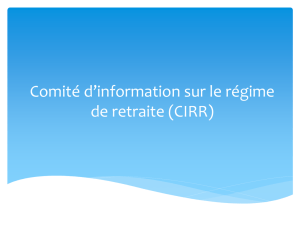
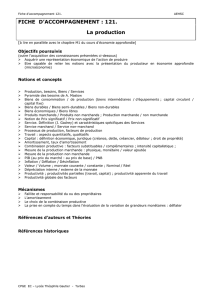
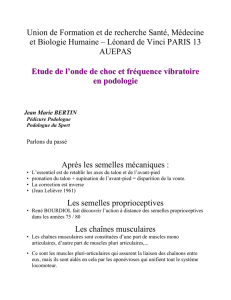
2.3 Frottement de Coulomb
La force de friction résultante du mouvement relatif de deux surfaces en contact est
généralement modélisée par une force constante proportionnelle à la charge normale entre les
surfaces et opposée au vecteur de vitesse instantanée [126, 135].
La Figure 3 présente un système mécanique à un ddl. Si
()
NtF
µ
<,
µ
étant le coefficient
de frottement, la masse m ne se déplace pas, si
()
NtF
µ
≥, le mouvement a lieu sans arrêt, le
signe de la force de friction changeant avec le signe de la vitesse w, de sorte que l'équation du
mouvement devient :
() ( )
wsgnNtFwkwm
µ
−=+ . (10)
Fc
k
N
w(t)
F(t)
m
Force
µ
N
w
Fc
-sin (
ω
t)
Sgn(-sin (
ω
t))
ω
t
- 4/π sin
(
ω
t
)
w
Fig.3. Amortissement par friction [135]
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
1
/
26
100%