Systèmes Mésoélectroniques-Capteurs Groupe Capteurs

SMC/GCIM Septembre 1998
Systèmes Mésoélectroniques-Capteurs
Groupe Capteurs Instrumentation et Microsystèmes
Equipe Microsystèmes
(collaborations LAAS, IEF)
La plupart des moteurs électriques classiquement rencontrés sont de type électromagnétique. Bien
qu'ayant été inventés les premiers (1748 Benjamin Franklin), les moteurs utilisant les forces électrostatiques
ont quant à eux trouvé très peu d'applications du fait des faibles efforts qu'ils développent et des hautes
tensions d'alimentation qu'ils nécessitent dans les gammes de dimensions courantes. Pourtant, les moteurs
électrostatiques sont à nouveau à l'ordre du jour et font l'objet d'études dans plusieurs laboratoires de
recherche. En effet, pour des dimensions extrêmement réduites (échelle micrométrique), ce type de moteur
développe des efforts intéressants et ne nécessite pas des tensions d'alimentation extrêmement élevées.
D'autre part, les moteurs électrostatiques présentent l'avantage de pouvoir facilement être miniaturisés et de
nouvelles techniques d'usinage, dérivées des procédés d'intégration utilisés en microélectronique, ont été
mises au point pour fabriquer ces nouveaux microactionneurs.
Les études effectuées au LESiR sur la modélisation et la simulation de tels moteurs se sont faites
dans le cadre de deux GDR : GDR Microsystèmes et GDR Imagerie Médicale multimodalité quantitative.
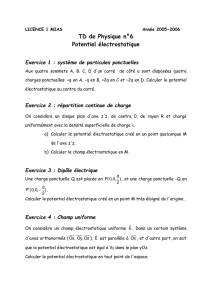
Exemple d'application potentielle : Conception et réalisation d'un cathéter avec micromoteur intégré
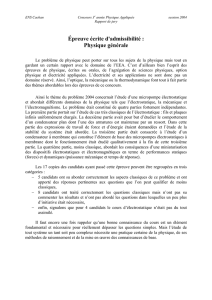
L'échographie ultrasonore intravasculaire se fait à l'aide de cathéters véhiculant un transducteur
piézoélectrique à leur extrémité. Afin de réaliser une image, il est nécessaire d'effectuer un balayage de
l'onde ultrasonore avec une grande précision sur la vitesse et la position angulaire de l'élément en
rotation. En réponse à ce cahier des charges, nous présentons la possibilité d'introduire à l'extrémité du
cathéter un micromoteur de type électrostatique. Le microactionneur doit avoir un diamètre hors tout
(moteur+connexions) de 1 à 2 mm, il doit entraîner un miroir acoustique dans un liquide de couplage à
une vitesse de rotation de 500 à 2000 tr/mn
moteur
capteur + miroir
cathéter
avec arbre flexible
paroi du vaisseau sanguin
micromoteur capteur ultrasonore
faisant tourner
cathéter
le miroir
miroir
Système actuel Extrémité du cathéter comprenant un micromoteur
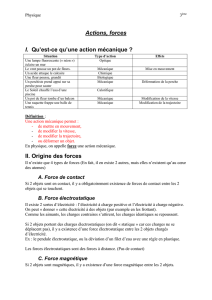
Action du LESiR : Modélisation des micromoteurs électrostatiques en vue de leur dimensionnement
Le dimensionnement des micromoteurs électrostatiques est en
général basé sur l'utilisation de simulation numérique utilisant des codes
de calcul par éléments finis. Mais, à cause des nombreuses combinaisons
géométriques possibles, ce type d'optimisation nécessite beaucoup de
temps de calcul et doit être renouvelé pour chaque application en fonction
du cahier des charges. Nous avons mis au point une optimisation des
moteurs électrostatiques à réluctance diélectrique variable (MRDV) à
excitation radiale basée uniquement sur une modélisation analytique de
l'évolution de la capacité stator/rotor. A partir d'un cahier des charges fixé
et des limites du procédé de fabrication utilisé, cette optimisation permet
de dimensionner le micromoteur délivrant un couple moyen maximum et
une ondulation de couple minimale. Après avoir mis au point cette
modélisation analytique, nous avons développé des outils de simulations
numériques (sous Matlab) afin de prédire le fonctionnement dynamique de
ce type de micromoteur électrostatique.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 10-4
0
0.5
1
1.5
2
2.5
3x 10-4
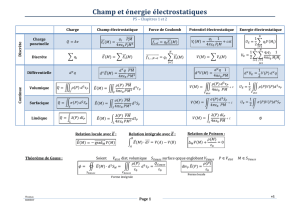
rayon rotorique
Couple Moteur (Nm/m)
6/4 12/818/1224/1630/20
36/24
42/28
48/32
54/36
60/40
6/4
Couple moteur optimal en fonction du
rayon rotorique
Contact :
I. DUFOUR LESIR/SMC tél. : 33 (0) 1 47 40 55 87 - fax : 33 (0) 1 47 40 21 99
E. SARRAUTE LESIR/SMC tél. : 33 (0) 1 47 40 55 86 - fax : 33 (0) 1 47 40 21 99
Micromoteur électrostatique à capacité variable

SMC/GCIM Septembre 1998
Systèmes Mésoélectroniques-Capteurs
Groupe Capteurs Instrumentation et Microsystèmes
Equipe Microsystèmes
Micropompe électrostatique à membrane
(collaborations ESIEE, IEF, LAAS)
Dans le cadre de l’action 'Micromed' du GDR Microsystèmes notre équipe s’est attachée à étudier le
dimensionnement et le comportement des micropompes à membrane pour la délivrance de médicaments in
vivo. Le choix de l’actionnement résulte d’une étude comparative faite entre les différentes solutions
envisageables (thermopneumatique, magnétique, piézo-électrique, électrostatique) : la solution
thermopneumatique a été écartée compte tenu des problèmes d’échauffement qu’elle engendre, la solution
magnétique conduit également à des échauffements et à une consommation relativement importante, les
solutions piézo-électriques et électrostatiques paraissent donc intéressantes pour l’application. Pour des
raisons de simplicité de fabrication la solution électrostatique a dans un premier temps été retenue.
Exemple d'application potentielle (Micromed) : Traitement de l'hypertension
Compression
de l'artère
Artère Capteur
de pression
Module de traitement
des signaux
et de commande
Pompe d'injection
de médicament
Réservoir
Délivrance
du
médicament
Ce microsystème
d'administration de
médicaments in vivo visant
le traitement de
l'hypertension artérielle
instable devra avoir un
volume extérieur de 1cm3
et comportera un réservoir
de médicament de 3cm3
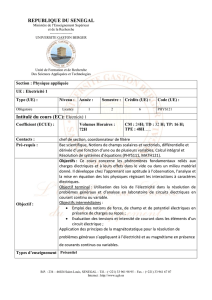
Action du LESiR : Modélisation des micropompes électrostatiques en vue de leur dimensionnement
Notre étude s’est décomposée en deux étapes : une modélisation du fonctionnement statique et des
simulations du fonctionnement dynamique de la micropompe électrostatique à membrane.
- Une modélisation analytique du comportement statique a été mise au point afin d’appréhender
l’influence des différents paramètres dimensionnels. Cette modélisation prend en compte le phénomène
d’instabilité de l’actionnement électrostatique qui dans un tel système peut conduire au plaquage de la
membrane contre l’électrode. Le modèle analytique développé permet de montrer l’intérêt d’utiliser ce type de
pompe avec des tensions d’alimentation supérieures à la limite de collement (volume déplacé et pression
générée plus importants). D’autre part, le fait que cette modélisation soit paramétrique permet d’optimiser les
dimensions des micropompes : nous avons montré que pour une tension d’alimentation donnée, il existe un
entrefer optimal qui permet d’avoir un volume élémentaire déplacé maximum et qui permet également
d’obtenir un minimum de variation de ce volume en fonction des variations d’entrefer dues au procédé de
fabrication.
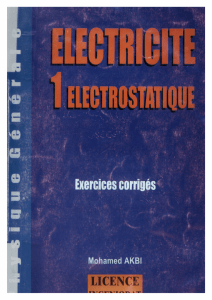
Membrane déformée Electrode
Isolant
U
Valves
Chambre
Entrée Sortie
020 40 60 80 100 120
-10
-5
0
5
10
15
20
25
30
35
40
Tension (V)
Volume
P=-2000Pa
P=0Pa
Collement
Hystérésis
(nl)
Décollement
Structure de micropompes Modélisation statique
- Des programmes de simulation dynamique du comportement de la micropompe ont également été mis
au point afin de pouvoir prédéterminer les caractéristiques globales du système. Ces programmes de
simulation tiennent compte du plaquage possible de la membrane contre l’électrode et de l’hystérésis qui en
découle. L’originalité de ces simulations vient du fait qu’ils sont utilisables pour des tensions supérieures à la
limite de collement et que les programmes sont modulaires.
Contact :
I. DUFOUR LESIR/SMC tél. : 33 (0) 1 47 40 55 87 - fax : 33 (0) 1 47 40 21 99
O. FRANCAIS LESIR/SMC tél. : 33 (0) 1 47 40 55 87 - fax : 33 (0) 1 47 40 21 99
email : francais@lesir.ens-cachan.fr

SMC/GCIM Septembre 1998
Systèmes Mésoélectroniques-Capteurs
Groupe Capteurs Instrumentation et Microsystèmes
Equipe Microsystèmes
Microtransformateur piézoélectrique
(collaborations universitaires : ESIEE)
(collaborations industrielles : GAÏA CONVERTER, PZT INTERNATIONAL)
Introduction :
La miniaturisation de plus en plus poussée des matériels mobiles utilisés en télécommunication mais aussi
dans d’autres domaines d’application tels que le génie médical ou l’instrumentation, nécessite de disposer de
sources d’énergie électrique de quelques Watts à quelques dizaines de Watts, très compactes, et offrant de
bonnes performances en terme de rendement, de fiabilité, de compatibilité électromagnétique. Dans ce
cadre, l’utilisation de transformateurs piézoélectriques apparaît comme une solution tout à fait prometteuse
par comparaison à la solution électromagnétique classique. L’utilisation d’une telle technologie pourrait
permettre, à terme, d’envisager la fabrication de convertisseurs électriques monolithiques (ce qui n’est pas le
cas actuellement) à coût réduit, tout en améliorant leur fiabilité et réduisant leur taille.
Applications :
L’amélioration des techniques de fabrication de céramiques piézoélectriques massives ou sous forme de
couches minces permet d’envisager de nouvelles architectures de transformateurs piézoélectriques bien
adaptées à certaines applications identifiées, dans une gamme de puissance inférieure à 30 Watts : (i)
alimentations réparties DC/DC pour cartes ou dispositifs électroniques (ii) convertisseurs AC/DC pour
adaptateurs secteur intégrés d’équipements portables (iii) alimentations intégrées hautes tensions pour rétro-
éclairage d’écrans LCD (iiii) alimentation haute tension pour lampe à décharge.
Action du LESiR :
Notre équipe a développé depuis quelques années une expérience en terme de modélisation, de
dimensionnement de structures piézoélectriques. Nous étudions et mettons au point des méthodes de
modélisation et de simulation de structures piézoélectriques basées sur la définition de modèles électriques
équivalents ainsi que sur l’utilisation de code de calculs par éléments finis en deux et trois dimensions
(ANSYS). Ces deux techniques permettent d’appréhender de façon à la fois locale et globale le
fonctionnement des structures. Notre démarche de travail consiste à mettre au point des méthodes de
dimensionnement permettant de définir, compte-tenu d’un cahier des charges initial, la structure de
transformateur adaptée à telle ou telle application. Enfin, nous travaillons actuellement sur la réalisation d’un
convertisseur électrique DC/DC - 48V/5V - 20 W , dont les performances seront comparées à des produits
classiques du marché.
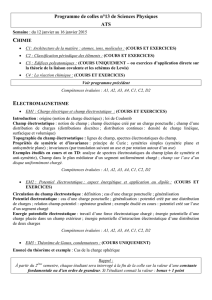
Basse effet
inverse
tension énergie
mécanique effet
direct Haute
tension
(résonance)
Principe et structure élémentaires
Contact :
E. SARRAUTE LESIR/SMC tél. : 33 (0) 1 47 40 55 86 - fax : 33 (0) 1 47 40 21 99
S. HALLAERT LESIR/SMC tél. : 33 (0) 1 47 40 55 86 - fax : 33 (0) 1 47 40 21 99
1
/
3
100%