Réf BO : chap E53 Conversion Electromagnétique

MOTORISATION ELECTRIQUE
DEL FRANCO/ROMAGNAN 1/9
840909156
Réf BO : chap E53 Conversion Electromagnétique
I- PRESENTATION :
Ce cours à pour objectif de présenter les principes de fonctionnement des
moteurs électriques.
Il se compose de trois parties : Les machines à courant continu, les machines à
courant alternatif et les moteurs pas à pas.
II- MOTEUR A COURANT CONTINU :
La machine à courant continu est réversible, c’est à dire qu’elle peut fonctionner
en moteur et en génératrice.
II-1- Rappel Forces de Laplace :
La force de Laplace
F
est toujours perpendiculaire au courant électrique
I
et au
vecteur induction magnétique.
F
=
I
B
.l
II-2- Principe :
L’application de la loi de Laplace est le principe de fonctionnement du moteur à
courant continu. Cette force engendre un couple pour entraîner le moteur en
rotation.

MOTORISATION ELECTRIQUE
DEL FRANCO/ROMAGNAN 2/9
840909156
II-3- Constitution :
Le moteur est constitué d’un rotor et d’un stator.
Le stator, appelé aussi inducteur, produit le champ magnétique, on parle de flux
d'excitation, ce champ est créé soit à partir d'un bobinage soit à l'aide d'aimants
permanents collés à l'intérieur du stator si le moteur est de petite taille de
quelques Watts à une centaine.
Le rotor solidaire de l'arbre appelé aussi induit reçoit le courant de puissance
par
l'intermédiaire du collecteur assurant avec les balais un contact glissant.
D'une manière très concise on classe les constituants d'un moteur à courant
continu en trois groupes.
. les organes mécaniques :
- deux flasques aux extrémités du stator portant l'arbre moteur sur deux
roulements, - une turbine de ventilation, - un carter enveloppe du stator.
. les organes électriques :
- le bobinage d'induit constitué de conducteurs logés dans des encoches, - le
collecteur à lames et les balais alimentant ce bobinage, - un bobinage inducteur
pour créer le flux parfois remplacé par des aimants permanents.
. les organes magnétiques pour canaliser le flux magnétique:
- le stator avec ses pôles inducteurs, - l'induit, constitué de tôles empilées.
II-4- Modélisation :
Le modèle électrique du moteur à courant continu est constitué d’une fem E
d’une résistance en série r et d’une inductance L
II-5- Equations caractéristiques :
Notations utilisées :
U : tension aux bornes de l’induit
I : Courant dans l’induit.
E : Force électromotrice en volts.
k : Constante liée à la constitution du
moteur
n : Vitesse du moteur en Tr/mn.
: Rendement du moteur
: Vitesse de rotation en rd/s
: Flux d’excitation en Wb

MOTORISATION ELECTRIQUE
DEL FRANCO/ROMAGNAN 3/9
840909156
II-6- Loi d’Ohm du moteur (on néglige l’influence de L : régime purement
continu) :
U = E + rI
Force électromotrice : E = k.n.
Puissance électromagnétique Pem = T. = E.I
Couple électromagnétique T = E.I /
Puissance absorbée Pa= U.I (induit)
Puissance mécanique et rendement Pu = Tu. et = Pu / Pa
II-7- Bilan énergétique d’une MCC :
II-8- Plaque signalétique :
Cette plaque fixée sur tous les moteurs spécifie les valeurs du point de
fonctionnement nominal .
Déterminer la puissance absorbée et le rendement de ce moteur.
Remarque importante : Pour changer le sens de rotation il suffit d’inverser le
sens du courant dans l’induit.

MOTORISATION ELECTRIQUE
DEL FRANCO/ROMAGNAN 4/9
840909156
II-9- Réversibilité et quadrants de fonctionnement :
Le moteur à courant continu est réversible : de moteur il peut devenir
génératrice. Cette possibilité offre au moteur un moyen de freinage très efficace.
Le repère vitesse couple délimite 4 quadrants de fonctionnement. La vitesse et
le couple sont l’image de la tension et du courant.
Chaque quadrant définit un fonctionnement moteur ou génératrice suivant le
signe de la puissance.
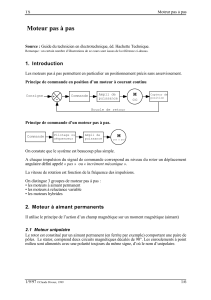
III- MOTEUR PAS A PAS :
III-1- Description :
Le moteur pas à pas est actionneur mécanique où l’on contrôle
- la vitesse, par la fréquence des impulsions de commande
- le sens de rotation, par l’ordre de ces impulsions
- l’angle de rotation par le nombre d’impulsions.
Le déplacement angulaire minimal de ce moteur correspond à un pas.
III-2- Principe :
Deux principes différents de réalisation des moteurs pas à pas qui permettent
d’obtenir trois moteurs différents.
- Les moteurs pas à pas à réluctance variable.
- Les moteurs pas à pas à aimants permanents.
- Les moteurs pas à pas hybrides qui combinent les deux types précédents.

MOTORISATION ELECTRIQUE
DEL FRANCO/ROMAGNAN 5/9
840909156
III-3- Principe de la réluctance variable :
Ce principe repose sur l’énoncé suivant : Dans un circuit magnétique le flux
cherche à être maximum en empruntant le circuit de moindre réluctance (comme
le courant ).
III-4- Principe du moteur à aimants permanents :
Ce principe est basé sur le phénomène d’attraction ou de répulsion des pôles
d’un aimant. Il suffit d ‘alimenter les bobines par des courants continus.
III-5- Principe du moteur bipolaire et unipolaire :
Un moteur est dit unipolaire lorsqu’un enroulement crée toujours un pôle de
même nom ; la polarisation de l’enroulement est unique.
Un moteur est dit bipolaire lorsqu’un enroulement crée soit un pôle nord soit un
pôle sud selon le sens du courant
S
+
-
I1=1
N
S
E1
E2
I2=0
S
+
-
I1=0
N
S
E1
E2
I2=1
I1=0
N
S
E1
E2
I2=0
S
I1=0
N
S
E1
E2
I2=1
1
2
S
34
 6
7
8
9
6
7
8
9
1
/
9
100%