Le Magic-Arms (d`après E4A PSI 1999)

17/04/17 1 769790335
Le Magic-Arms (d’après E4A PSI 1999)
durée 5 heures
Les trois parties sont indépendantes et peuvent être traitées dans un ordre quelconque.
0 PRÉSENTATION GÉNÉRALE
0.1 Mise en situation de l'étude
Nul ne peut imaginer les fêtes foraines régulièrement organisées dans nos villes et nos
campagnes sans "barbes à papa", manèges à sièges suspendus par des chaînes ou auto-
tamponneuses. Il est tout aussi impensable que le progrès technique soit resté absent de ces
centres de loisir traditionnels. En parcourant le pays de long en large, nous découvrons ainsi
des attractions plus amusantes les unes que les autres, prometteuses d'émotions fortes et
d'aventures et mettant notre courage à l'épreuve. Ces machineries attirent bien souvent de
nombreux badauds. Plus rares sont ceux qui osent s'y risquer.
FIG. 0.1 : Le "Magic-Arms" en action
Leur commande est assistée par un calculateur et elles sont animées par un entraînement
hydraulique ou électrique pour réaliser des mouvements qui ne pourraient être effectués
d'aucune autre manière. La société WAAGNER-BIRO complète la gamme des manèges à

17/04/17 2 769790335
haute technicité par une machinerie au nom de "Magie Arms" (voir figure 0.1). Les
mouvements simultanés de ce dernier autour de trois axes désorientent les 39 passagers
embarqués qui ne savent plus reconnaître le dessus du dessous pendant quelques minutes.
0.2 Présentation de l’étude
Avec le Magic-Arms, la société WAAGNER-BIRO a développé un nouveau manège
procurant aux passagers de nouvelles sensations dues à des séquences variées de
mouvements.
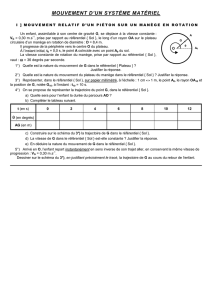
L’installation est composée d’une structure métallique d’environ 12 m de haut avec deux bras
mobiles (voir figure 0.2).
Bras 1
Bras 2
Axe 1Axe 2
Axe 3
4 reduluspic120 2 reduluspic120
1 reduluspic80
Nacelle
FIG. 0.2 : Schéma de principe du Magic-Arms
Les passagers s’assoient sur 39 sièges en mousse disposés sur une plate-forme tournante, au
design novateur et sont parfaitement maintenus par un harnais. Dès que tous les passagers
sont assis et attachés, le bras principal (bras 1) et le bras pivot (bras 2), liés l’un à l’autre au
début du cycle, commencent à tourner. En même temps, la nacelle tourne autour de son axe.
Après 9 secondes, le maximum de hauteur est atteint et les deux bras se désindexent et se
mettent à tourner indépendamment l’un de l’autre. Tous les mouvements sont pilotés par un
ordinateur.
Cette installation permet une combinaison de mouvements entièrement nouvelle. Les
passagers sont « fous » de ces tours de manège dans des positions verticales ou inclinées, tête
en bas ou en haut, incluant des mouvements combinés dans les trois dimensions. Ils adorent
être secoués et faire des looping à une vitesse élevée.
0.3 Unités
On utilise les unités du système international.

17/04/17 3 769790335
1 COMPRÉHENSION GÉNÉRALE
1.1 Compréhension générale du fonctionnement du manège
Q A U T O N U M 11a : A partir des documents A9, A10 et A11, expliquer la mise en
mouvement du bras 1 (bras principal) à partir des actionneurs installés. Justifier l’utilisation
de quatre moteurs électriques pour un même entraînement.
Q A U T O N U M Quels problèmes risque-t-on de rencontrer en utilisant quatre
moteurs ?
Q A U T O N U M 11c : Quelle est la fonction des éléments (3) du document A9 ?
1.2 Étude des sensations du passager
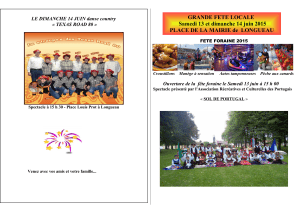
On s’intéresser plus particulièrement au passager le plus sollicité. Un schéma (voir document
A1) donne la position et la désignation des masses concentrées modélisant l’ensemble du
manège. Il donne également les angles et les repères attachés aux différents ensembles. Les
valeurs de ces masses et les longueurs qui les situent par rapport aux différents repères sont
données dans le tableau 1.1. Les couples sont donnés pour t = 27 s + t.y
Solide
Point
Masse
val.
kg
Longueur
val.
m
Inertie
kg.m2
Cple pes.
Nm
Mt Dyn
Nm
Bras 1
G1a
m1a
19500
y1a
6,50
0
-76620
G1b
m1b
560
y1b
6,25
0
-2034
G1c
m1c
2480
y1c
3,00
N1
N2
G1d
m1d
2900
y1d
-2,30
0
-1426
G1e
m1e
1930
y1e
-3,70
0
-2457
G1f
m1f
3500
y1f
0
J1* = 4235
0
-400
G1g
m1g
5450
y1g = y1
-3,90
J2* = 2780
0
-7709
G1h
m1h
2500
y1h = y1
-3,90
0
-3536
O2
z1
5,00
Bras 2
G2a
m2a
9800
y2a
3,50
103978
100441
G2b
m2b
1140
y2b
1,74
N3
N4
G2c
m2c
2570
y2c
-2,33
-18153
-26837
Nacelle 3
G3a
m3a
2930
y2a
-2,69
-23893
-34947
G3b
m3b
7370
y2b
-3,04
J3* = 41580
-98919
-98715
Gp
mp
75
y2p
z3p
-2,87
-2,61
(0)
(0)
Totaux :
N5
N6
* : Ces quantités sont prises en compte dans le calcul du moment dynamique
TAB 1.1 Désignations et valeurs numériques des paramètres

17/04/17 4 769790335
O1
z0
G2a
G2b
G1h
G2c
G3a
G3b
G1g
G1a
G1b
G1c
G1d
G1e
O2
z0
z3
x2
x3
O3
Gp
3
3
G1a
G1b
G1c 1
y1
y1
y0
x0
1
x1
y2
x2
G2a
G2b G1d
O1
O2
2
Gp
21
y2
O3
G
3a 3b
G
Vue
rabattue
z3
O3
Gp
G1f G1f
G1e
Document A1
1.2.1 Expression de la vitesse du passager
On suppose que les passagers peuvent monter et descendre de la nacelle quand les i sont
nuls.
Q A U T O N U M 12la : Exprimer les taux de rotation de chacun des solides i par
rapport au bâti 0 :
(i/0), en fonction des vitesses articulaires 1
•, 2
•, 3
•, avec i
• = di
dt
Q A U T O N U M 121b : Donner, pour chaque solide, l’expression du taux de rotation
(i/j). La rotation relative du solide i par rapport au solide j étant notée ij, en déduire
l’expression des i
• en fonction des vitesses articulaires relatives ij
•.
Q A U T O N U M 12lc : Déterminer la vitesse du point Gp du passager par rapport au
bâti 0, notée V
(Gp,3/0), en projection sur le repère R2 et en utilisant les i.

17/04/17 5 769790335
Document A2 : Vitesse de rotation (rad/s)
Q A U T O N U M 121d : À partir du document A2, exprimer analytiquement les
valeurs des angles 1021 et 32, dans l’intervalle de temps [17s, 27s]. Donner la valeur
numérique de ces angles pour t = 19,8 s en les ramenant dans le domaine [0, 2].
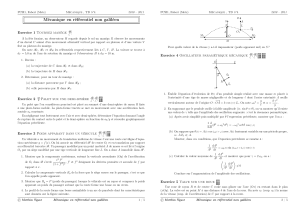
Document A3 : rotations relatives [18s,31s] (rad)
Q A U T O N U M 12le : Vérifier les résultats numériques précédents en observant le
document A3.
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%