Modélisation du mouvement par la méthode d`Euler

m
V
g
m
f
af
1
2
2
2
2
21..
ll v
v
BaBv
v
B
aBvAa
)().()(
)()(
)( tzttvttz
ttzttz
tv
iii ztvz
.
1
m
V
gv
m
k
af
1
2
2
2
1
l
i
iv
v
Ba
)().()( tvttattv
iii vtav
.
1
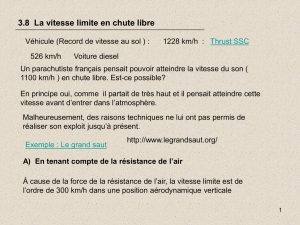
MOUVEMENTS DE CHUTES VERTICALES
Modélisation du mouvement par la méthode d’Euler
I/ But
On cherche à modéliser le mouvement de chute d’un objet dans un fluide. La trajectoire de l’objet va être fonction de sa propre
densité et de la densité du fluide considéré. La méthode d’Euler est une méthode d’approximation qui permet de calculer la
vitesse, l’accélération et la position de l’objet dans sa chute en connaissant les conditions initiales du système.
II/ Méthode d’Euler
Considérons la relation établie en cours :
On étudie le mouvement d’une bille lâchée sans vitesse initiale dans un fluide avec les paramètres suivants :
masse de la bille m = 107,4 g ; rayon de la bille r = 1,54 cm ; masse volumique du fluide ρf = 1,260 kg.L-1 ;
accélération de la pesanteur g = 9,81 m.s-2 ; = 3,1416 ; vlimite = 0,930 m.s-1 ; intervalle de temps t = 0,01 s
On prendra f = kv2, l’expression 1 devient donc :
On écrira plus simplement : a + A v2 = B avec A et B deux constantes.
On en déduit les expressions suivantes : A = ………………. B = ………………………………………
1) Expression de A en fonction de B
Lorsque l’objet a atteint sa vitesse limite vl dans le fluide, quelle est la valeur de l’accélération ? a = ……..
En déduire une relation entre A et B.
2) Conditions initiales
Quelle est la valeur de la vitesse à t = 0 s ? v0 = ……….
En déduire l’expression de a0. Puis calculer a0.
3) Expression de l’accélération a
L’expression 2 peut s’écrire :
ou, pour le traitement informatique :
4) Expression de la vitesse v
Si t est suffisamment petit une valeur approchée de l’accélération est donnée par :
ttvttv
ta )()(
)(
ou, pour le traitement informatique :
5)Expression de la position z
Si t est suffisamment petit une valeur approchée de la vitesse est donnée par :
ou, pour le traitement informatique :
III/ Utilisation d’un tableur
A l’aide d’un tableur, on se propose de tracer la variation de a, v et z grâce à la modélisation proposée par la méthode d’Euler.
(Expression 1)
(Expression 2)

m
V
g
m
f
af
1
2
2
2
2
21..
ll v
v
BaBv
v
B
aBvAa
)().()(
)()(
)( tzttvttz
ttzttz
tv
iii ztvz
.
1
m
V
gv
m
k
af
1
2
2
2
1
l
i
iv
v
Ba
)().()( tvttattv
iii vtav
.
1
MOUVEMENTS DE CHUTES VERTICALES
Modélisation du mouvement par la méthode d’Euler
I/ But
On cherche à modéliser le mouvement de chute d’un objet dans un fluide. La trajectoire de l’objet va être fonction de sa propre
densité et de la densité du fluide considéré. La méthode d’Euler est une méthode d’approximation qui permet de calculer la
vitesse, l’accélération et la position de l’objet dans sa chute en connaissant les conditions initiales du système.
II/ Méthode d’Euler
Considérons la relation établie en cours :
On étudie le mouvement d’une bille lâchée sans vitesse initiale dans un fluide avec les paramètres suivants :
masse de la bille m = 107,4 g ; rayon de la bille r = 1,54 cm ; masse volumique du fluide ρf = 1,260 kg.L-1 ;
accélération de la pesanteur g = 9,81 m.s-2 ; = 3,1416 ; vlimite = 0,930 m.s-1 ; intervalle de temps t = 0,01 s
On prendra f = kv2, l’expression 1 devient donc :
On écrira plus simplement : a + A v2 = B avec A et B deux constantes.
On en déduit les expressions suivantes : A = ………………. B = ………………………………………
1) Expression de A en fonction de B
Lorsque l’objet a atteint sa vitesse limite vl dans le fluide, quelle est la valeur de l’accélération ? a = ……..
En déduire une relation entre A et B.
2) Conditions initiales
Quelle est la valeur de la vitesse à t = 0 s ? v0 = ……….
En déduire l’expression de a0. Puis calculer a0.
3) Expression de l’accélération a
L’expression 2 peut s’écrire :
ou, pour le traitement informatique :
4) Expression de la vitesse v
Si t est suffisamment petit une valeur approchée de l’accélération est donnée par :
ttvttv
ta )()(
)(
ou, pour le traitement informatique :
5)Expression de la position z
Si t est suffisamment petit une valeur approchée de la vitesse est donnée par :
ou, pour le traitement informatique :
III/ Utilisation d’un tableur
A l’aide d’un tableur, on se propose de tracer la variation de a, v et z grâce à la modélisation proposée par la méthode d’Euler.
(Expression 1)
(Expression 2)
1
/
2
100%