Document

Moteur asynchrone triphasé:
1. Constitution etprincipe de fonctionnemen
1.1. Stator = inducteur
Il estconstitué de troisenroulements (bobines) parcourus par des
courants alternatifstriphasés et possède p paires de pôles.
Champ tournantLes courants alternatifsdans le stator créent un
champ magnétiqueBtournant à la pulsation de[1]
synchronisme :
ΩS : vitessesynchrone de rotation du champ tournant en rad.s-1. : pulsation des
courants alternatifs en rad.s-1. = 2..fp :nombre de paires de pôles.
: pulsation des courants alternatifs en rad.s-1. = 2..f
p : nombre de paires de pôles.
s 𝑤
𝑝

1.2. Rotor = induit
Le rotor n’estrelié à aucune alimentation.Il tourne à la vitesse de
rotation Ω.
Rotor à cage d’écureuil
Il estconstitué de barresconductricestrèssouvent en aluminium. Les
extrémités de cesbarressontréunies par
deuxcouronneségalementconductrices. On ditquele rotor est en court-
circuit.
Sa résistance électriqueesttrèsfaible.[3]
1.3. Rotor bobiné
Les tôles de ce rotor sontmuniesd’encochesoùsontplacés des
conducteurs formant des bobinages[2].On peutaccéder à
cesbobinages par l’intermédiaire de troisbagues et troisbalais.
Cedispositifpermet de modifier les propriétésélectromécaniques du
moteur
1.4. Courants induits
Des courants induitscirculentdans le rotor.
1.5. Entrefer
L’entreferestl’espace entre le stator et le rotor.

1.6. Glissement
Le rotor tourne à la vitesse Ω plus petite que la vitesse de
synchronisme Ωs. On ditque le rotor «�glisse�» par rapport au
champ tournant.Ceglissement g vadépendre de la charge.[4]
2. Symboles
3. Caractéristiques
3.1. Fonctionnement à vide
A vide le moteurn’entraîne pas de charge.
Conséquence: le gilssementestnulest le moteurtourne à la vitesse de
synchronisme.
A vide: g=0 n0 nS
Autresobservations :
- lefacteur de puissance à vide esttrèsfaible (<0,2) et le courant
absorbéereste fort (P est petit et Q est grand).On parlealors de courant
réactifoumagnétisant (ilsservent à créer le champ magnétique.[3]

3.2. Fonctionnement en charge
Le moteurfournitmaintenant de la puissance active, le stator
appelleuncourant actif.
Remarque :le moteurasynchroneest capable de démarrer en charge.
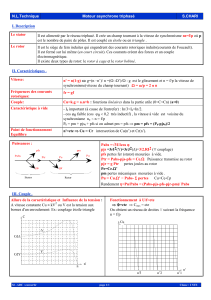
3.3. Caractéristiquemécanique Tu = f(n)
3.4. Modélisation de la partie utile de la courbe
On veutdéterminerl’équation de la droite qui modélise la partie utile
de la caractéristiquemécanique.
Il fautdeux points�:
Equation d’unedroite�: Coefficient directeur (pente)�:
Ordonnée à l’origine : point A1
ya.xb
Tu a.nb

n2 nS a.nS b
x2 x1=aest grand (droitepresqueverticale) et a estnégatif.
Remarque: le point A2 peutaussiêtrefourni par les informations
figurant sur la plaque signalétique de la machine (couple nominal Tn et
vitessenominale nn).
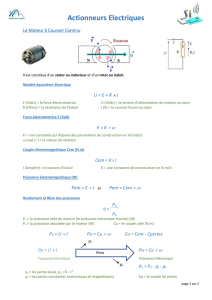
3.5. Caractéristiquemécanique en fonction du glissement
L’axe en n etl’axe en g sontinversés.
D’où la mêmecaractéristique avec l’axe en g. Cettefois ci le
modèleestunedroite passant
parl’origine, doncd’équation: yk.xsoitTu k.g[1]
Finalement:
Au voisinage du point de fonctionnement nominal, le couple utile
estproportionnel au glissement.[2]
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%