coupe de la peau

BTS Design de Mode Le Toucher
LE TOUCHER
Introduction :
On distingue quatre systèmes de mécanorécepteurs servant respectivement dans des
fonctions perceptives différentes. La perception tactile peut ainsi être comprise comme la
somme de ces fonctions. Les récepteurs dans chacun de ces systèmes semblent en effet, être
spécialisés pour leurs fonctions perceptives.
Nous nous intéresserons dans ce chapitre à une de ces modalités principales, qui est la
sensibilité mécanique, nous ne parlerons pas de la sensibilité thermique, chimique ni de la
douleur. De la sensibilité mécanique cutanée nous distinguons trois qualités principales, à
savoir, la sensibilité à la pression, le toucher stricto sensu (toucher statique ou encore tact) et
la sensibilité à la vibration (ou toucher dynamique).
L'organisation anatomique permet de distinguer quatre types de récepteurs pour la
peau glabre : Les disques de Merkel
Les corpuscules de Meissner
Les corpuscules de Ruffini
Les corpuscules de Pacini.
Ces récepteurs ont des propriétés d'adaptation différentes, et chacun d’entre eux répond de
manière différente à une déformation cutanée. Cette différence de réponse semble être
principalement due à leurs différences de structure.
1. LES RECEPTEURS DE MERKEL
Les disques de Merkel [15] ont la structure la plus simple, dans la couche basse de
l'épiderme (0,7 mm). Ils sont très denses dans notre peau, de l'ordre de 100 par centimètre
carré dans le bout des doigts. Les deux propriétés essentielles de leurs réponses sont, la
sensibilité aux points, aux arêtes et à la courbure. D'autre part, ils ont une importante
résolution spatiale qui se traduit par une discrimination spatiale de 0,5 mm malgré un champ
récepteur d'un diamètre de 2 à 3 mm.
Ces récepteurs sont au moins dix fois plus sensibles aux stimuli dynamiques que
statiques. Ainsi ils sont plus sensibles à la forme et à la texture quand les doigts scrutent en
balayant la surface que lorsqu'ils restent statiques.
2. LES RECEPTEURS DE MEISSNER
Les corpuscules de Meissner [17] innervent la peau et sont encore plus dense (150 par
centimètre carré dans le bout des doigts) que les récepteurs de Merkel. Ils sont insensibles
aux déformations statiques de la peau, et sont environ quatre fois plus sensibles aux
déformations dynamiques de la peau. Leur champ récepteur varie de 3 à 5 millimètres de
diamètre et donc offre une pauvre résolution spatiale.
3. LES CORPUSCULES DE PACINI

BTS Design de Mode Le Toucher
Le corpuscule de Pacini [20] est large, avec environ 70 enveloppes externes
renfermant une seule terminaison nerveuse, il est sensible à des déformations de l'ordre du
nanomètre. Ces enveloppes fonctionnent comme des filtres mécaniques pour les rendre
insensibles à la durée de la stimulation et à sa vitesse d'apparition. Ils sont de l'ordre de
350 par doigt et 800 dans la paume. De leurs propriétés remarquables, on retiendra une
extrême sensibilité qui se caractérise par la détection d'un mouvement de la peau de l'ordre de
10 nanomètres et un filtrage intense des stimuli de basse fréquence. Ces récepteurs sont
localisés dans le tissu adipeux des couches sous-cutanées (2mm), ainsi que dans les tendons,
et les régions articulaires. Enfin, la structure de ces récepteurs leur permet d'être sensible à
l'accélération de la déformation cutanée, la secousse (vibration).
4. LES CORPUSCULES DE RUFFINI ET DE GOLGI
Le corpuscule de Ruffini [18], de par sa structure, ressemble à l'organe tendineux de
Golgi [21] d'un muscle. Il est localisé dans le tissu conjonctif du derme, ce qui le rend
particulièrement sensible aux étirements de la peau. Son champ récepteur est environ cinq fois
plus large que celui des récepteurs de Merkel. Ces récepteurs sont six fois moins sensibles à la
pression et deux à quatre fois plus sensibles aux étirements de la peau que les récepteurs de
Merkel.
Conclusion :
Nous retiendrons qu'il existe à l'heure actuelle une discrimination très précise des
différentes fonctions associées aux mécanorécepteurs de la peau glabre. Cependant dans des
expériences et a fortiori dans la vie courante, il est souvent difficile d'isoler ces récepteurs ou
de quantifier leurs rôles respectifs.
On retiendra surtout qu’il existe deux grands types de Toucher : le toucher
statique et le toucher dynamique : nous pouvons en effet remarquer une différence entre
les mécanorécepteurs, suivant que le toucher est utilisé dans un traitement à dominante
temporelle (mouvement en dynamique) ou à dominante spatiale (en statique).
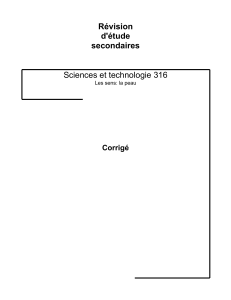
COUPE DE LA PEAU

BTS Design de Mode Le Toucher
1. Epiderme (la ligne de tirets marque la limite de la couche cornée.)
2. Derme
3. Pannicule adipeux
4. Tissu celluleux sous-cutané
5. Aponévrose superficielle de revêtement
6. Papilles dermiques
7. Poil
8. Gaine du poil
9. Bulbe du poil
10. Glande sébacée s'ouvrant dans la gaine du poil
11. Muscle arrecteur
12. Glande sudoripare
13. Pore sudoripare
14. Nerf sensitif de la peau
15. Disque de Merkel (pression et toucher dynamique)
16. Terminaisons nerveuses libres (douleur)
17. Corpuscule de Meissner (toucher dynamique)
18. Corpuscule de Ruffini (chaleur)
19. Corpuscule de Krause (froid)
20. Corpuscule de Pacini (pression et vibration)
21. Corpuscule de Golgi-Mazzoni (pression faible)

BTS Design de Mode Le Toucher
1
/
4
100%