Devoir surveillé N°5.

PCSI. 98/99. Physique
Devoir surveillé N°5.
Il est rappelé que votre copie est destinée à être lue et corrigée. En conséquence, une présentation
claire et lisible est recommandée. Il en sera tenu compte dans la notation.
Les questions sont numérotées. Les réponses à ces questions devront être données sous forme littérale
la plus simplifiée possible, encadrées, avant toute application numérique. Toute réponse non justifiée
sera considérée comme fausse. Toutes les applications numériques seront effectuées dans le système
international d’unités. Il ne sera pas tenu compte des applications numériques ne comportant pas
d’indications d’unités. Il est choisi de représenter les vecteurs en caractères gras, non surmontés de
flèches. Ainsi le vecteur
AB
sera écrit AB. La valeur du vecteur AB est écrite AB.
Problème 1. Etude d’une source et d’un détecteur utilisés dans un montage
d’optique.
On étudie un montage, qui utilise comme source lumineuse une diode laser qui émet de la lumière dont
la longueur d’onde dépend du courant (courant d’injection) qui traverse la diode. Quand la diode est
parcourue par un courant constant Io, elle émet une radiation monochromatique de longueur d’onde o.
En superposant à Io un courant iDL(t), petit devant Io, on provoque une variation (t) de la longueur
d’onde, proportionnelle à iDL(t), sans variation notable de la puissance optique émise. On posera =
iDL, où est une constante positive.
D’autre part, le détecteur convertit le signal optique reçu en sortie du montage d’optique, en un signal
électrique pouvant subir divers traitements analogiques et numériques.
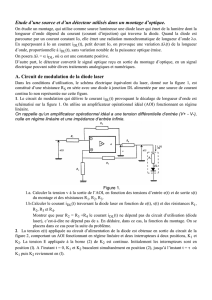
A. Circuit de modulation de la diode laser
Dans les conditions d’utilisation, le schéma électrique équivalent du laser, donné sur la figure 1, est
constitué d’une résistance RS en série avec une diode à jonction DL alimentée par une source de
courant continu Io non représentée sur cette figure.
1. Le circuit de modulation qui délivre le courant iDL(t) provoquant le décalage de longueur d’onde est
schématisé sur la figure 1. A est un amplificateur opérationnel idéal (AOI) fonctionnant en régime
linéaire.
On rappelle qu’un amplificateur opérationnel idéal a une tension différentielle d’entrée (V+ - V-), nulle en
régime linéaire et une impédance d’entrée infinie.
Figure 1.
1.a. Calculer la tension v à la sortie de A, en fonction des tensions d’entrée e(t) et de sortie s(t) du
montage et des résistances R1, R2, R3.
1.b.Calculer le courant iDL(t) traversant la diode laser en fonction de e(t), s(t) et des résistances R1,
R2, R3 et R4.

Montrer que pour R2 = R3 +R4 le courant iDL(t) ne dépend pas du circuit d’utilisation (diode
laser), c’est-à-dire ne dépend de s. En déduire, dans ce cas, la fonction du montage.
2. La tension e(t) appliquée au circuit d’alimentation de la diode est obtenue en sortie du circuit de la
figure 2, comportant un AOI fonctionnant en régime linéaire et deux interrupteurs à deux positions, K1 et
K2. La tension E appliquée à la borne (2) de K2 est continue. Initialement les interrupteurs sont en
position (l).
A l’instant t = 0, K1 et K2 basculent simultanément en position (2), jusqu’à l’instant t = où K1 puis K2
reviennent en (l).
Figure 2.
2.a. Déterminer, dans l’intervalle de temps [0, ], la forme de la tension e(t) délivrée par ce circuit.
On posera e(t=0) = 0. Tracer le graphe e(t). Quel rôle joue ce circuit?
2.b. Déterminer pour t > , la tension e(t) et le courant i’’(t) qui traverse la résistance R’’. Préciser
l’utilité de la branche R’’, K2.
2.c. Déterminer dans l’intervalle de temps [0, ], le courant iDL(t) traversant la diode laser en
fonction de E, C et des résistances R1, R3, R4 et R’.
2.d. est suffisamment petit pour que iDL reste inférieure à une valeur limite imax., (imax.= 10 mA).
Dans ces conditions, la variation de la puissance optique émise est faible et l’accroissement de
longueur d’onde est proportionnel à iDL : = iDL. Montrer que dans l’intervalle de ( )
temps
[0, ], la variation de la longueur d’onde est fonction linéaire du temps, avec : =t. Calculer
en fonction de et des composants des circuits étudiés.
2.e. Application numérique :
Dans le circuit de la figure 5, R’ = l M , C = 50 F et E = 15 V; on fixe la valeur maximum
de e(t) l à 0,1 V; calculer .
= 2 nm.A-1; R1 = 1000 ; R3 = 5.105 ; R4 = 560 ; calculer .
Dans la suite, on considérera
comme une donnée du problème.
B. Circuit de détection.
Le détecteur est une photodiode de surface utile suffisamment petite (= 0,1 mm2 ) pour qu’on puisse
considérer qu’elle est uniformément éclairée et qu’elle détecte l’éclairement en un point F du montage
optique ( non représenté dans ce problème).
1. La photodiode est polarisée en inverse par une différence de potentiel V appliquée par un circuit qui
ne sera pas étudié ici. Soumise à une puissance optique (flux lumineux) Po, elle est parcourue par un
courant total donné par la relation :
1
V
V
expIII O
obsphotd

où Iphot est proportionnel à la puissance optique reçue Iphot = -KPo. On donne K= 0,625 A.W-1 dans les
conditions de la mesure . Iobs = 10-10 A. Vo dépend de la température : on prendra Vo = 10 mV.
1.a. Tracer, pour V variant entre -2 volts et + 0,15 volts, les caractéristiques Id(V) du détecteur pour
trois valeurs de la puissance optique reçue :
Po = 0 W ; Po = 10-3 W ; Po = 3. 10-3 W.
1.b. Montrer, à partir de ces courbes, que la photodiode se comporte comme une source de
courant en parallèle sur une conductance négligeable et que le courant délivré, Id est
proportionnel à la puissance optique reçue.
2. Le détecteur délivre un courant basse fréquence (quelques centaines de Hertz) auquel est superposé
un bruit haute fréquence ( > 100 kHz). Ce courant est injecté sur l’entrée inverseuse d’un AOI suivant le
schéma de la figure 3.
Figure 3.
2.a. Exprimer, en fonction des valeurs des composants et de K le rapport v1/Po de la tension de
sortie du montage de la figure 6, à la puissance optique incidente au point F.
2.b. Application numérique : R5 = l M ; l’aire de la surface du détecteur étant égale à 0,1 mm2
donner la relation entre v1, et l’éclairement en F.
3. On place après le montage précédent une cellule de filtrage représentée sur la Figure 4.
Figure 4.
3.a. Déterminer la fonction de transfert harmonique de ce circuit.
3.b. On donne R6 = 2260 ; R7 = 16,5 ; C1 = 100 pF ; C2 = 470 pF.
Etudier les variations avec la fréquence du module de la fonction de transfert. Tracer dans le
plan de Bode la courbe de réponse en amplitude, en précisant les asymptotes et les points
particuliers.
3.c.Préciser la nature de ce filtre et son rôle dans le circuit de détection.
3.d. Donner la relation entre la tension vd de sortie de ce circuit et l’éclairement S(F) de la surface
du détecteur, en précisant la condition de validité de cette relation.
Problème 2. Analogies électromécaniques.
Dans tout le problème, g(t) désigne la valeur instantanée de la grandeur g. Si la grandeur g varie
sinusoïdalement g(t) = Gocos ( t + ), son amplitude complexe Goexpj est notée
.G

Ce problème est consacrée aux analogies électromécaniques. Les grandeurs électriques étant de loin
plus facilement modifiables que les grandeurs mécaniques, de nombreuses analogies ont été
développées pour simuler et étudier le comportement de n’importe quel phénomène mécanique ou plus
généralement physique.
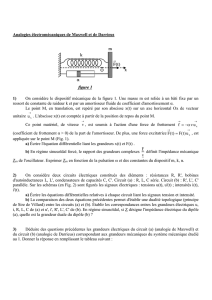
Partie A.
On considère le dispositif mécanique de la figure 1. Une masse m est reliée a un bâti fixe par un ressort
de constante de raideur k (ou de souplesse s = 1
k) et par un amortisseur fluide de coefficient
d’amortissement a. Cette masse est de plus, soumise a une force F(t) . La masse, en translation, est
repérée par son abscisse x(t) , comptée à partir de sa position de repos. On rappelle qu’un amortisseur
fluide exerce sur chacune de ses deux extrémités une force de frottement de norme au où a est une
constante positive et où u désigne la norme de la vitesse relative d’une extrémité par rapport à l’autre.
Le coefficient a peut être réglé par la variation du débit d’huile à travers un trou percé dans le piston
mobile de l’amortisseur.
Fig.1 Fig.2a Fig.2.b.
1.a. Ecrire l’équation différentielle liant les grandeurs x(t) et F(t) (F(t) = F(t)ex).
1.b. En régime sinusoïdal forcé, le rapport des amplitudes complexes
U/F
, u(t) étant la vitesse de
la masse m, définit l’impédance mécanique
m
Z
de l’oscillateur. Exprimer
m
Z
en fonction des
constantes du dispositif m, k, a.
2. On considère les deux circuits électriques de la figure 2 constitués des éléments : résistances R, R’,
bobines d’inductance L, L’, condensateurs C, C’.
Circuit (a) : R, L, C série. Circuit (b) : R’, L’, C’ parallèle. Sur les schémas, sont figurés les signaux
électriques : tensions v(t), v’(t) , intensités i(t) , i"(t).
2.a. Ecrire les équations différentielles relatives à chaque circuit liant les signaux tension et
intensité.
2.b. La comparaison des deux équations précédentes permet d’établir une dualité topologique
(principe de Sire de Villard) entre les circuits (a) et (b). Etablir les correspondances entre les
grandeurs électriques V, I, R, L, C de (a) et V’, I’, R’, L’, C’ de (b).
En régime sinusoïdal, si
Z
désigne l’impédance électrique du dipôle (a), quelle est la grandeur
duale du dipôle (b).
3. Déduire des questions précédentes les grandeurs électriques du circuit (a) (analogie de Maxwell) et
du circuit (b) (analogie de Darrieus) correspondant aux grandeurs mécaniques du système mécanique
étudié au 1. Donner la réponse sous la forme du tableau suivant :
Système
mécanique
u(t)
F(t)
m
k
a
2
mu2
kx2
2
m
Z
Elec (a).
Analogie de
Maxwell
Elec (b).
Analogie de
Darrieus
Partie B.

1. On considère le dispositif mécanique de la figure 3méca. On note xo(t), l’abscisse de la masse mo et
x(t) celle de la masse m.
1.a. Ecrire deux équations différentielles indépendantes satisfaites par x(t) et xo(t).
Fig.3méca Fig.3elec Fig.4
1.b. Dans le cas particulier où la masse mo est négligeable, écrire l’équation différentielle vérifiée
par xo(t).
2. On considère le circuit électrique de la figure 3elec, sur laquelle sont figurées les constantes R, L, C
et les signaux électriques v(t), i(t) , io(t).
2.a. Quel est l’équivalent mécanique de ce circuit?
Partie C. Applications.
1. On considère la figure 4.
1.a. Déterminer les circuits électriques équivalents aux dispositifs mécaniques de la figure 4 :
• deux ressorts en parallèle, de même allongement x, de raideurs k1 , k2 ;
• deux amortisseurs en parallèle, de coefficients a1, a2, de même vitesse relative u.
2. On considère le filtre mécanique résonant à deux cellules de la figure 5.
Figure 5. Figure 6.
2.a. On considère tout d’abord une seule cellule [m, k1, F(t)]. Comment doit-on modifier les circuits
électriques de la figure 2 pour qu’ils soient équivalents à ce système mécanique ? En régime
sinusoïdal forcé, à la pulsation , établir le rapport des amplitudes complexes de la vitesse
1
U
de la masse m1 et de la force appliquée
F
. Exprimer ce rapport
H
=
1
U
/
F
en fonction de ,
m1, s1. Justifier le terme de filtre résonant.
2.b. Ecrire les deux équations mécaniques du filtre à deux cellules, en régime sinusoïdal forcé, liant
les amplitudes complexe
F
,
1
U
,
2
U
.
2.c. Transposer les deux équations mécaniques en utilisant l’analogie de Maxwell. Représenter le
circuit correspondant sur lequel on notera les constantes et les signaux électriques.
2.d. Reprendre la question c en utilisant l’analogie de Darrieus.
2.e. Déterminer la fonction de transfert mécanique H =
1
U
/
F
, du filtre à deux cellules en utilisant
l’équivalent électrique qui vous semble le plus commode.
3. Un véhicule, de masse M = 4m = 103 kg, est posé sur quatre ressorts et amortisseurs identiques.
Chaque ressort est comprimé identiquement et l’écrasement résultant est de 2,5 cm.
3.a. Calculer la souplesse s de chaque ressort. Déterminer la pulsation r et la fréquence fr des
oscillations non amorties résultant d’un petit écart à la position d’équilibre précédente.
 6
6
1
/
6
100%

![cahier_descharges_diode[1]](http://s1.studylibfr.com/store/data/000193458_1-ed2550a0be242d3899cf0878a5b1e976-300x300.png)