1.6) Principe des actions mutuelles

C.F.
L.P. Saint Exupéry
STATIQUE
C.i.10 : Le comportement statique des mécanismes
Fiche 1
Modélisation des actions mécaniques
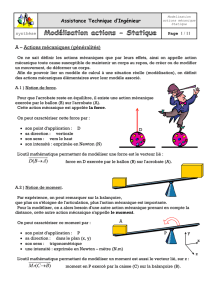
1) Modélisation des actions mécaniques.
1.1) Hypothèses sur les solides
1.1.1) Solide réel :
Solide dont les atomes et les molécules occupent des positions relativement stables.
C'est à dire : - La masse du solide reste constante
- Il est Indéformable (très peu de déformation malgré les sollicitations qu'il peut recevoir).
1.1.2) Solide déformable :
Solide voyant sa forme varier suivant les sollicitations qu'il peut recevoir.
C'est à dire: - La masse du solide reste constante.
- Il est déformable.
1.1.3) Solide parfait :
La masse du solide reste constante. Il est Indéformable, géométriquement parfait, homogène et isotrope.
Définitions : - HOMOGENE : Corps dont tous les constituants sont de même nature.
- ISOTROPE : Corps dont les propriétés mécaniques sont identiques dans toutes les directions.
1.2) Action mécanique ou Force:définitions
- On appelle action mécanique toutes causes susceptibles de créer un déplacement, maintenir un solide en
équilibre ou déformer un solide.
- Les grandeurs physiques utilisées seront des forces (N), des moments (N.m), des pressions (Pa = N/mm2)….Elles
représenteront des actions mécaniques réelles.
- Le vecteur sera la représentation graphique de ces grandeurs.
1.3) Représentation d’une action mécanique
1.3.1) Représentation d’une force : les vecteurs
Un vecteur représente une force .
Un vecteur est complètement défini si l'on connaît ses 4 paramètres:
L’origine du vecteur représente le point d’application de la force
La direction
Le sens
La longueur du vecteur est proportionnelle à l’intensité
de la force avec une échelle choisie
Unités : L'unité utilisée pour les forces est le Newton symbole N
On utilise aussi beaucoup son multiple le déca Newton symbole daN

C.F.
L.P. Saint Exupéry
STATIQUE
C.i.10 : Le comportement statique des mécanismes
Fiche 2
Modélisation des actions mécaniques
y
x
z
F
y
F
x
F
z
F
A
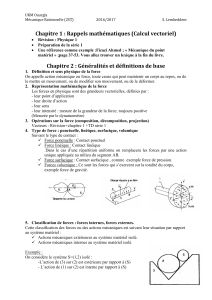
1.3.2) Composantes d’une force :
Une force
F
agissant en un point A peut toujours être remplacée par plusieurs
autres forces ou composantes (
xF
,
yF
et
zF
) agissant au même point et vérifiant
la condition :
F
=
zFyFxF
(somme vectorielle)
Dans le repère
zyxAR ,,,
F
a pour composantes
xF
,
yF
et
zF
.
Les composantes peuvent être positives ou négatives.
Au minimum, on décompose un effort en deux
composantes.
On dit que est la résultante de +
- On distinguera deux familles d'actions mécaniques:
Les actions mécaniques à distance : Pesanteur, effets magnétiques, électriques ou électrostatiques.
Les actions mécaniques de contact.
1.4) Actions mécaniques à distance
1.4.1) Pesanteur :
Cette action est appelée poids ou pesanteur, elle est représentée par un vecteur poids dirigé vers le bas, appliqué
au centre de gravité, dont l’intensité est définie par la formule suivante :
║║ou P : poids du corps en newton (N)
m : masse du corps en kilogramme (kg)
║ ║: intensité de la pesanteur (N/kg ou m/s2) ║║ = 9,81 N/kg
1.4.2) Électrostatisme et électromagnétisme :
L’électrostatique et la loi de Coulomb concernent les charges électriques et les « grains d’électricité ». Cette loi ne
sera pas utilisée en mécanique.
L’électromagnétisme permet de donner les caractéristiques mécaniques des moteurs électriques et repose sur la loi
de Laplace, que vous aborderez en Sciences Physiques.
1.5) Les actions mécaniques de contact (frottements négligés)
- Il existe trois types de contact ; il y a donc trois familles d'actions mécaniques de contact leur correspondant:
les actions ou charges concentrées sur un point : Contact ponctuel
les actions de contact réparties sur une ligne : Contact linéique
les actions de contact réparties sur une surface : Contact surfacique
1.5.1) Les actions ou charges concentrées :
Chaque fois que l’effort de contact est concentré sur un point, l’action peut-être représenté par une force
perpendiculaire à la surface de contact et appliqué sur le point de contact.
Au contact de la bille et du plan il y a deux actions:
-
1/2
A
: Action au point A du solide 2 sur le solide 1
-
2/1
A
: Action au point A du solide 1 sur le solide 2
A
1/2
A
2/1
A
1
2
║║ = m x║║= m x g

C.F.
L.P. Saint Exupéry
STATIQUE
C.i.10 : Le comportement statique des mécanismes
Fiche 3
Modélisation des actions mécaniques
1
x
y
A
B
C
Charge répartie en N/m
2
1
x
y
A
B
C
2/1
C
2
x
y
z
Action du fluide
1
G
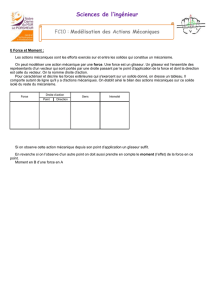
1.5.2) Les actions de contact réparties sur une ligne :
L’effort de contact réparti sur une ligne peut-être représenté par une charge linéique « q » uniforme (unité : N/m).
On pourra remplacer une charge linéique uniforme par sa résultante F, telle que :
Cette force sera appliquée au centre de gravité de la ligne de contact.
Exemple d’action répartie sur une ligne: contact Cylindre sur plan
1.5.3) Actions de contact réparties sur une surface : L’effort de contact réparti sur
une surface peut être représenté
par une pression de contact « p »
uniforme (unité : Pascal noté Pa).
On pourra remplacer une pression
de contact uniforme par sa
résultante F telle que :
Cette force sera appliquée au
centre de gravité de la surface.
Exemple : Piston de vérin, Action résultante due à un effort de pression:
4
2
1/ d
pspFFluide
Unités : 1 MPa = 1 N/mm2 = 10 bars
1 bar = 1 daN/cm²
F = ql
x
y
z
1
G
1/fluide
F
daN
cm2
F = pS
daN/cm2

C.F.
L.P. Saint Exupéry
STATIQUE
C.i.10 : Le comportement statique des mécanismes
Fiche 4
Modélisation des actions mécaniques
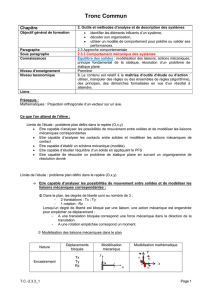
1.6) Principe des actions mutuelles
Toute force implique l’existence d’une autre force qui lui est
directement opposée. C’est le principe des actions mutuelles.
1221 // AA
Remarque:
S’il n’y a pas de frottement les actions sont perpendiculaires au plan tangent aux
deux surfaces de contact et sont dirigées vers l’intérieur de la matière.
Exemple : actions de contact pour une voiture à l’arrêt
1.6) Moment d’une force par rapport à un point
1.6.1) Définition : On appelle moment d’une force par rapport à un
point O, noté (O;) ou o( le produit de la force par la distance
de la force au point (bras de levier).
O() ou (O ;) = x OA = x d
Convention de signe
Si fait tourner le solide autour de O dans le sens trigonométrique,
le moment est dit positif.
Si fait tourner le solide autour de O dans le sens horaire,
le moment est dit négatif.
Remarque : Si B est le point d’application de F et si la longueur [AB] est connue, (A ;) peut être calculé par :
(A ;)= x d = x AB.sin α
en remarquant que AB.sin α = d
Sol 0
Sol 0
On isole la voiture 1
On isole le sol 0
voiture 1
A
21 /
A
12/
A
1
2
0/1
1/0
0/1
1/0
A
B
A
B
A
B
0/1
0/1
1/0
1/0
0/1 = - 1/0
0/1 = - 1/0
d
+
-

C.F.
L.P. Saint Exupéry
STATIQUE
C.i.10 : Le comportement statique des mécanismes
Fiche 5
Modélisation des actions mécaniques
1.6.2) Théorème de Varignon :
Le moment de la force au point A est égal à la
somme des moments de ses composantes et
par rapport au même point.
(A ;) = x d
Pour le cas ci-contre :
(A ;) = (x du) +( x dv)
1.6.3) Moment résultant de plusieurs
forces :
Le moment résultant (A ;) en un point A de i forces F1, F2,…,Fi est égal à la somme des moments en A de
chacune des forces : (A ;) = (A ;1) + (A ;2) +….+(A ;i)
Exemple 1: Déterminer (A;3/2): Exemple 2 :
- Si [AB] est perpendiculaire à 3/2 Déterminer (A ;) :
_________________________________________ ____________________________________
- Si a = 60° _______________________________ _______________________________________
________________________________________ _______________________________________
- Si a = 45° _______________________________ _____________________________________
1.7) Couples (de forces)
1.7.1) Définition :
Un couple est un système de deux forces parallèles
égales, de sens contraire, mais non directement opposées.
Le bras de levier du couple est la distance « d » qui sépare les
lignes d’action des deux forces.
1.7.2) Moment d’un couple :
Le moment d’un couple est égal au produit de l’intensité
de l’une des forces par la longueur du bras de levier.
║o║ = ║║x d
d
 6
6
1
/
6
100%