i - modelisation des liaisons

COURS
Modélisation des liaisons et des actions mécaniques
Prépa BTS
1 / 15
y
x
z
Un système de référence muni d’un repère
d’espace et d’un repère de temps, constitue un
référentiel.
I - MODELISATION DES LIAISONS:
I-1 Solide:
Qu’est ce qu’un solide?
On distingue trois familles de corps :
- les corps solide : table
- les corps liquide : eau
- les corps gazeux : air
Dans les corps solides, on fera la différence entre :
Solide réel : C’est un solide qui possède une masse constante et un volume dont les limites varient sous l’action
d’un système de forces extérieures suivant une loi inconnue à priori.
C’est le cas de la table, corps dur indéformable à priori, et de la feuille, corps mou déformable.
Solide indéformable : C’est le solide théorique qui possède une masse
constante et un volume dont les limites sont invariantes quelque soient
les actions extérieures auxquelles il est soumis.
A et B (S),t ,
CteAB
C’est le solide théorique que l’on considère en statique, en cinématique ou en dynamique en fait le solide
parfaitement indéformable n’existe pas.
En pratique, on considérera :
- soit des solides indéformables
- soit des solides déformables suivants une loi connue (Ressort, Rondelles élastiques)
I-2 Repérage d’un solide par rapport à un
autre: a- Choix d’un référentiel :
Un référentiel est déterminé par le choix d’un système de
référence, d’un repère d’espace et d’un repère de temps. En
effet, un repère d’espace n’est pas en lui-même suffisant pour
décrire le mouvement d’un solide par rapport au système de
référence, car si le repère d’espace permet de connaître la
forme de la trajectoire, il ne permet pas de préciser la position du
mobile sur celle-ci à un instant donné.
b- Les repères :
A
B
(S)

COURS
Modélisation des liaisons et des actions mécaniques
Prépa BTS
2 / 15
Repère plans :
R
)j ,i (O,
est le repère du plan
A (2, 3) coordonnées de A dans le plan
O : est l’origine du repère
(O,
x
) : est l’axe des abscisses
(O,
y
) : est l’axe des ordonnées
)j ,i(
: est une base du plan
si (O,
x
) (O,
y
) le repère est orthogonal
si
1 j i
le repère est normé
Un repère qui est à la fois orthogonal et normé est dit
orthonormé.
Repères dans l’espace :
R
)k ,j ,i (O,
est le repère dans l’espace
O : est l’origine du repère
(O,
x
) : est l’axe des abscisses
(O,
y
) : est l’axe des ordonnées
(O,
z
) : est l’axe des cotes
)k ,j ,i(
: est une base dans l’espace
Remarque : Le repère orthonormé direct vérifie la règle des
trois doigts de la main droite.
Pour se souvenir du sens des 3 axes d’un trièdre direct, il existe
une méthode simple dite des 3 doigts de la main droite. Pouce,
index et majeur de la main droite, ils situent respectivement les
axes X, Y et Z. Les doigts donnent les sens des axes.
En mécanique, il faudra toujours prendre des repères orthonormés directs.
Le repère Galiléen :
Si nous étudions le mouvement d’un objet dans une salle de classe, il est
commode de choisir le référentiel terrestre appelé aussi référentiel du
laboratoire, dont le système de référence est la terre.
Il est lié à la Terre dans son mouvement autour du soleil et dans son
mouvement propre autour des pôles.
Un repère qui lui est couramment associé comporte deux axes horizontaux et un
axe vertical.
x
y
i
j
A
z
y
k
j
x
i
x
y
z
N
S
Repère associé au
référentiel terrestre

COURS
Modélisation des liaisons et des actions mécaniques
Prépa BTS
3 / 15
I-3 Les liaisons :
a - Introduction :
Un système mécanique est généralement composé de plusieurs solides ayant une ou plusieurs surfaces de contacts
entre eux. La géométrie caractéristique de ces surfaces de contact permet de définir des liaisons que l’on appellera
liaisons mécaniques.
Ces liaisons sont classées en fonction des efforts transmissibles d’un solide vers l’autre ou en
fonction des mouvements qu’elles permettent entre les deux solides considérés.b - Caractéristiques d’une
fonction :
Si on considère deux solides n’ayant aucun contact entre eux, le nombre de mouvement maximum possible entre
les deux solides est de 6, on appellera ces mouvements degrés de liberté.
Ainsi pour définir une liaison, on recherchera dans un premier temps les surfaces de contacts entre les deux
solides considérés. Puis ensuite les mouvements possibles.
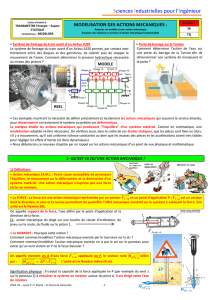
La pièce peut se déplacer :
- par Translation suivant chacun des axes : Tx, Ty, Tz
- par Rotation autour de chacun des axes : Rx, Ry, Rz
Chaque déplacement doit s’effectuer dans les deux sens.
Pour chacune des liaisons mécaniques rencontrées, on
définira les degrés de liberté de la liaison en comptant
les mouvements possibles. Lorsqu’un mouvement est
empêché, on aura un degré de liaison.
Dans tous les cas : Nbre de degré de liberté + Nbre de degré de liaison = 6
Les liaisons mécaniques :
Définitions :
La liaison ponctuelle : Deux solides ou ensembles matériels sont en liaison ponctuelle si,
en fonctionnement, l’intersection de leur représentation géométrique se réduit à un point ou à
une surface suffisamment possible devant les dimensions des solides liés.
La liaison linéaire rectiligne : Deux solides sont en liaison rectiligne si, pendant le
fonctionnement, l’intersection de leur représentation géométrique se réduit à un segment
de droite ou à une portion de plan suffisamment petite pour être considérée comme telle.
y
x
z
Ty
Tx
Tz
Ry
Rx
Rz

COURS
Modélisation des liaisons et des actions mécaniques
Prépa BTS
4 / 15
La liaison linéaire annulaire : Deux solides sont en liaison linéaire annulaire si, au cours du fonctionnement,
l’intersection de leur représentation géométrique se réduit à un arc de cercle
ou à un cylindre de révolution dont le rapport de la longueur au diamètre est
suffisamment petit pour être considéré comme un arc de cercle.
La liaison Appui plan : Deux solides ou ensembles matériels sont en liaison appui plan si l’intersection de leur
représentation géométrique est constituée d’un plan ou de plusieurs portions de plan parallèles.
La liaison rotule : Deux solides sont en liaison rotule si dans leur déplacement, l’intersection de leur représentation
géométrique est une sphère ou une portion de sphère.
La liaison sphérique à doigt : La liaison sphérique à doigt est une liaison dérivée de la liaison rotule ; un doigt ( ou
ergot), coulissant dans une rainure, empêche une des trois rotations.

COURS
Modélisation des liaisons et des actions mécaniques
Prépa BTS
5 / 15
La liaison pivot glissant : Deux solides sont en liaison pivot glissant si dans leur déplacement, l’intersection de leur
représentation géométrique est un cylindre de révolution ou toute association d’éléments géométriques pouvant être
considéré comme telle.
La liaison pivot : Deux solides sont en liaison pivot si dans leur déplacement, l’intersection de leur représentation
géométrique est une surface de révolution différente d’un cylindre ou d’une sphère, ou une association de lignes ou de
points pouvant être considérée comme telle.
La liaison glissière : Deux solides sont en liaison glissière si dans leur déplacement, l’intersection de leur représentation
géométrique est un cylindre non de révolution ou une association de points de contact pouvant être considérée comme telle.
La liaison hélicoïdale : Deux solides sont en liaison hélicoïdale si dans leur déplacement, l’intersection de leur
représentation géométrique se réduit à une hélicoïde ou à une association d’éléments géométriques pouvant être considérée
comme telle.
La liaison encastrement : Deux solides sont en liaison encastrement s’il n’existe aucun degré de liberté entre les deux
solides. Le choix du référentiel est totalement libre.
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%