sommaire

1
Groupe référence P22 :
Pascale Bouveret Jean-Marie Foray
Frédéric Chenaval Gaétan Hirel
Dimitri Duchaux Guillaume Lecoeur
Rémi Faverial Sébastien Mathiou
Chef de projet : Pascale Bouveret
Maître d’ouvrage : Jean Paul Yonnet
Projet Bateau Electrique
Rapport technique
C’Velec 2002/2003

2
SOMMAIRE
I Problématique P. 5
I.1 Cahier des charges p. 5
I.2 Normes marines P. 5
I.3 Solution proposée P. 5
II Etude de l'existant P. 6
III Dimensionnement de la chaîne de propulsion P. 6
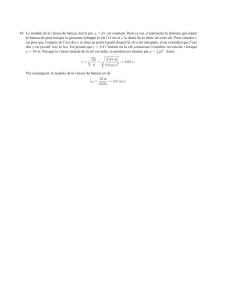
III.1 Puissance du moteur P. 6
a. Calcul à partir de la résistance à l'avancement
b. Estimation à partir de l'existant
III.2 Variateur P. 9
III.3 Energie embarquée P.9
IV Choix du matériel P. 10
IV.1 Fournisseurs de moteurs et de variateurs P. 10
IV.2 Choix des batteries P. 10
V Essais P. 12
V.1 Caractérisation de l'ensemble VALEO P. 12
a. Matériel utilisé
b. Caractérisation de la machine synchrone
c. Mode de commande du variateur
d. Essais à vide
e. Essais en charge
VI Bilan technique P. 16

3
Le projet
La naissance du projet BATEAU ELECTRIQUE est due à la rencontre entre M.Yonnet et
Mme Foucaud, directrice de l’entreprise SAVIBOAT, lors d’une conférence sur les bateaux
électrique durant l’été 2002. SAVIBOAT est une entreprise basée à SAINT SAVINIEN
(Charente Maritime) spécialisée dans la construction de bateaux électriques. Ils ont évoqué
ensemble la possibilité de mener une étude sur la motorisation de ces bateaux. M. Yonnet a
alors proposé aux membres du C’Velec cette étude pour SAVIBOAT, dans le cadre d’un
projet collectif.
Lors du colloque C’Velec en juin 2002, la rencontre avec M. Plasse, directeur recherche et
développement chez Valéo, nous a donné l’opportunité d’avoir accès à du matériel qui n’était
pas encore disponible sur le marché et qui correspondait à la gamme de puissance de notre
application.
C’est sur ces bases qu’a commencé le projet BATEAU ELECTRIQUE.

4
Remerciements
Le groupe du bateau électrique tient à remercier les personnes suivantes pour leur aide
précieuse dans la réalisation de notre projet :
Madame Brigitte FOUCAULT, PDG de l’entreprise Saviboat, pour toutes les
informations apportées pour la rédaction du cahier des charges ainsi que le prêt de
matériel.
Messieurs C. PLASSE et P. MASSON, de l’entreprise Valeo, pour le prêt du moteur et du
variateur, ainsi que les renseignements techniques qu’ils nous ont apportés.
Monsieur Jean-Paul YONNET, pour son investissement dans l’encadrement de notre
projet.
Monsieur Claude BRUN, pour la réalisation des pièces mécaniques.

5
I Problématique
I.1 Cahier des charges
Objectif : Réaliser la chaîne de traction d’un bateau tout électrique.
Le bateau devra transporter 24 personnes à une vitesse de croisière de 6 à 8 km/h.
L’autonomie devra être de 10 heures pour un type d’utilisation d’environ une dizaine de cycle
de fonctionnement par jour. La recharge des batteries s’effectuera par un chargeur connecté
au réseau EDF 230V par une simple prise de courant monophasée.
Cycle de fonctionnement : 30 minutes à 1 heure, avec des démarrages réguliers.
Contraintes : Une protection électrique suivant les normes marines devra être assurée.
La vitesse du moteur devra être ajustable.
Spécifications supplémentaires :
Masse du bateau à vide : 1t.
Poids maximal du lot de batterie : 800kg.
Longueur : 10 à 12 mètres.
Largeur : 2 à 2.5 mètres.
Tirant d’eau : 0.5 à 0.75 m.
La coque sera carrée et à fond plat. La largeur maximale sera à l’arrière du
bateau pour une meilleure pénétration dans l’eau.
Fabriquant de l’hélice : France Hélice.
Concepteur de la coque : M. Antoine Fritsch, Conflan-St Honorine.
I.2 Normes marines
Notre système de propulsion sera embarqué à l’intérieur de la coque. Il sera quasiment au
point le plus bas du bateau. Notre système devra donc donc remplir les conditions d’isolation
et d’étanchéité maximale (moteur étanche avec indice d’isolation IP56).
D’après la norme, la tension de sécurité en milieux humide est limitée à 50V. Ce qui implique
que les tensions en amont du convertisseur (en sortie des batteries) et celle en aval (en entrée
du moteur) seront inférieures à 50V DC.
I.3 Solution proposée
Dans une optique d’innovation dans le domaine de la traction électrique fluviale, nous avons
opté pour une technologie de moteur différente (moteur synchrone) de celle couramment
utilisée par les constructeurs de bateau électrique (de type à courant continu facile à
commander).
Le moteur à courant continu, présente une puissance massique (0.8 kW/kg) et un rendement
modeste (environ 65%) dans notre gamme de puissance (quelques kW).
Le moteur synchrone présente un intérêt certain du fait de son rapport puissance/poids plus
élevé (1.8 kW/kg), et un rendement de l’ordre de 85%.
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%