Moment d`une force, moment cinétique, théorème du moment

170
Repères non Galiléens
XII. REPERES NON INERTIELS (NON GALILEENS) ........................................... 171
1. INTRODUCTION ............................................................................................................................ 171
2. EXEMPLE : MOUVEMENT CIRCULAIRE UNIFORME ....................................................................... 171
3. "FORCE" CENTRIFUGE ................................................................................................................. 172
4. PSEUDO FORCES .......................................................................................................................... 174
5. PENSER AUTREMENT, PENSER GALILEE ...................................................................................... 174
5.1 Véhicule qui amorce un virage. ............................................................................................ 175
5.2 Sens d’enroulement des nuages autour des dépressions. ..................................................... 175
5.3 Marées .................................................................................................................................. 176
Mouvement circulaire uniforme: "force" centrifuge
O
x
y
Im
F
Oxy Galiléen
= -r 2 I
F = - F I
m= F
mr2= F
O
x
y
Im
FP
Y
X
Masse immobile dans PXY
Accélération nulle
Donc Forces = 0
mr 2I –F I = 0
mr2= F
"Force"
Centrifuge
+ mr 2I
Inertiel Non inertiel
+ pseudo force
r r

171
Repères non Galiléens
XII. REPERES NON INERTIELS
(NON GALILEENS)
I- 1. Introduction
L’utilisation d’un repère non galiléen pour résoudre un problème de dynamique est simplement une
autre présentation des relations de la dynamique que nous avons établies. Elle va nous amener à
définir des pseudo-forces pour remplacer certains termes d’accélération. Cette démarche s’apparente à
celle qui a consisté à définir une énergie potentielle de signe contraire à celui du travail.
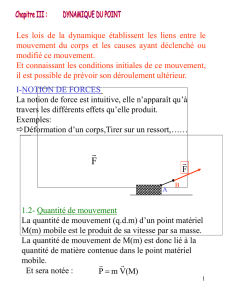
I- 2. Exemple : mouvement circulaire uniforme
Prenons le mouvement circulaire uniforme assuré par une force
F FI
dirigée vers le centre.
Dans un repère inertiel, l’application du PFD en utilisant les coordonnées polaires conduit au
résultat :
2
FI m rI
qui nous donne la relation classique entre la force, la masse, la vitesse angulaire et le rayon :
2
F m r
Plaçons nous dans un repère PXY tournant avec le mobile.
Il faut savoir qu'une force ne dépend pas du repère considéré (nous devons cependant préciser
que ce ne serait pas vrai en mécanique relativiste). Le bilan des forces est le même que
précédemment, seule la force
F
existe et son expression est inchangée..
On devrait donc pouvoir écrire :
22
22
()
d X d Y
FI m I J
dt dt
Cette équation implique que la force est nulle puisque
X
et
Y
sont constants !
Ou est l’erreur ?
L’erreur est que le PFD ne peut être appliqué que dans un repère inertiel, et par conséquent la dernière
équation est fausse.

172
Repères non Galiléens
I- 3. "Force" centrifuge
Dans le mouvement circulaire uniforme que nous venons d’analyser, il est possible d’appliquer le
PFD dans le repère mobile PXYZ en introduisant une "force" supplémentaire, la (trop) fameuse
"force" centrifuge, égale à
2
m rI

173
Repères non Galiléens
Elle est dont égale et OPPOSEE au produit de la masse par l’accélération du point mobile P, dirigée
vers l’extérieur du cercle.
L’écriture du PFD devient alors :
22
222
()
d X d Y
FI m rI m I J
dt dt
Comme
X
et
Y
sont constants (et même nuls), les accélérations associées sont nulles et donc :
20FI m rI
et par conséquent :
2
F m r
qui est la relation cherchée.
Pour résumer ce cas particulier, au lieu d’écrire
Fm
dans un repère Galiléen soit:
2
FI m rI
l’introduction de la force centrifuge nous conduit dans le repère tournant à écrire:
20FI m rI
c’est à dire à affirmer que le somme des forces est égale à zéro.
Mathématiquement, nous avons fait passer un terme de l’autre côté du signe égal et nous avons alors
naturellement changé son signe. Cette notion est dangereuse si on ne maîtrise pas parfaitement les
notions de mécanique, car elle peut conduire à des contradictions de type : si la somme des forces est
nulle, alors le mouvement doit être rectiligne uniforme (1ère loi de Newton), or il est circulaire … !
[ ( ) 2 ]
( ) 2
a
P
r
r
r
r
P
Fm
d
F m PM PM V
dt
d
F m m PM m PM m V m
dt
Du référentiel inertiel [a]
au référentiel quelconque [r] + pseudo forces
Accélération dans un repère inertiel [a]
Accélération dans un
référentiel quelconque [r]
4 pseudo-forces
[ ( ) 2 ]
( ) 2
a
P
r
r
r
r
P
Fm
d
F m PM PM V
dt
d
F m m PM m PM m V m
dt
Du référentiel inertiel [a]
au référentiel quelconque [r] + pseudo forces
Accélération dans un repère inertiel [a]
Accélération dans un
référentiel quelconque [r]
4 pseudo-forces

174
Repères non Galiléens
I- 4. Pseudo forces
La "force" centrifuge que nous venons d’introduire est une pseudo-force, certains emploient le terme
de "force d’origine cinématique", elle est seulement l’équivalent d’une force, elle ne fait absolument
pas partie des forces que nous avons identifiées en début de cours.
Il est donc possible, en introduisant des pseudo-forces d’écrire le PFD dans un repère non Galiléen. Il
y a ainsi des pseudo-forces centrifuges, de Coriolis …
Reprenons l’expression (compliquée) de la composition des accélérations (cf. chapitre changement de
repère) :
( ) 2
a P r r
d
PM PM V
dt
Supposons que le repère
a
R
soit inertiel. Dans le cas général, le repère
r
R
ne l'est pas car il n’est pas
simplement en translation uniforme par rapport à
a
R
. Prenons une masse
m
soumise à une force
F
.
L’application du PFD dans le repère Galiléen Ra s’écrit :
a
Fm
soit, pour faire intervenir le référentiel non Galiléen
r
R
:
( ) 2
P r r
d
F m PM PM V
dt
Pour se ramener dans le repère
r
R
, il faut arriver à une expression qui se présente sous la forme :
r
Fm
donc :
( ) 2
P r r
d
F m PM PM V m
dt
En conséquence de quoi, nous aurons l’expression correcte de l’accélération dans
r
R
à condition de
rajouter à la (vraie) force
F
un ensemble de 4 pseudo–forces :
( ) 2
Pr
d
m m PM m PM m V
dt
En conclusion, à notre niveau, il faut connaître l’existence de cette notion de pseudo forces, mais il
n’est pas nécessaire de les utiliser. Le travail mathématique est de toute manière strictement identique.
Attention en tous cas au changement de signe !
I- 5. Penser autrement, penser Galilée
Le recours à ces pseudo forces est en général bien ancré, et notamment la force centrifuge est très
souvent mise à contribution. C’est vrai qu’elle permet une "explication" à partir de sensations : nous
ressentons une force, alors que nous imaginons ou calculons une accélération.
 6
7
6
7
1
/
7
100%