carte principale -> Doc électronique

GUIDE DE REFERENCE
CARTE DE COMMANDE PRINCIPALE
SNOOKY COUPE 2002
PARTIE HARDWARE
Florent De Lamotte
François Pelletier Septembre 2002

Confidentiel 2/10
Avertissement
Le présent document fait office de notice et de complément pour la mise en œuvre et l’utilisation de
la carte mère du robot Snooky. Les autres documents de ce dossier sont au format électronique et
comportent le projet complet de la carte mère au niveau matériel : schéma électrique & placement –
routage au format ORCAD.

Confidentiel 3/10
Sommaire
Chapitre 1 Objectifs ....................................................................................................................... 4
Chapitre 2 Présentation de la carte de commande ..................................................................... 5
2.1 Contexte .................................................................................................................................. 5
2.2 Architecture ............................................................................................................................. 5
2.3 Schéma bloc ............................................................................................................................ 6
2.4 Entrées – Sorties ...................................................................................................................... 7
2.5 Contraintes .............................................................................................................................. 7
Alimentation ........................................................................................................................... 7
Dimensions ............................................................................................................................. 7
Emplacement .......................................................................................................................... 7
Chapitre 3 Réalisation du prototype ............................................................................................ 8
3.1 Modifications .......................................................................................................................... 8
3.2 Améliorations .......................................................................................................................... 8
Annexe A Schémas ....................................................................................................................... 9

Confidentiel 4/10
Chapitre 1
Objectifs
Le club de robotique de l’Ecole Supérieure d’Electronique de l’Ouest participe chaque année à la
Coupe de France de robotique E = M6. Dans le cadre de la mise au point d’un robot pour cette
compétition, il a été prévu la conception d’une carte de commande centrale du robot Snooky dont
les principales fonctions à effectuer sont :
communiquer avec les autres cartes électroniques,
servir de centre de commande,
accueillir les programmes de commande (stratégies).
En plus des fonctionnalités et contraintes liées à la coupe 2002, il est envisagé de développer la
carte de commande de manière évolutive. Dans la mesure du possible, et pour disposer d’une carte
qui puisse être réutilisable dans le futur, i.e. après la date de la compétition, des fonctionnalités
supplémentaires sont étudiées pour être intégrées (intégration de ports supplémentaires, qui
pourront être directement utilisables après une conception logicielle appropriée et laissée aussi libre
que possible). Ceci implique évidemment d’inclure une documentation la plus complète possible
sur les fonctionnalités de la carte, au niveau matériel (ports, caractéristiques électriques et
mécaniques, normes respectées) et au niveau logiciel (logiciels de programmation, état du
processeur et des mémoires, … : manuel d’utilisation).

Confidentiel 5/10
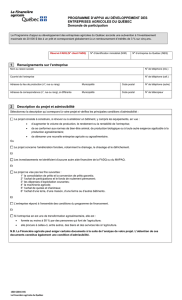
CARTE BARILLET
CAMERA
CARTE
D’ASSERVISSEMENT
INTERFACE DE
CONTROLE
CARTE DE COMMANDE
PRINCIPALE
Chapitre 2
Présentation de la carte de commande
2.1 Contexte
La carte de commande Snooky est au centre d’un système global qui va fournir les fonctions
attendues de la carte et les contraintes d’environnement pour sa conception et son fonctionnement,
en termes de protocoles de communication, de traitement des données, et d’élaboration de la
stratégie.
Figure 1 L’ensemble des cartes du robot
2.2 Architecture
La carte de commande Snooky doit communiquer avec de nombreux matériels mais est également
chargée de la commande générale du robot, en fonction de paramètres de stratégie, définis
préalablement et intégrés en mémoire. Une puissance de calcul suffisante doit donc être mise en
œuvre pour satisfaire à ces données, ainsi qu’un espace de stockage adéquat en vitesse et en taille.
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%