Licence GMI cours de Méthodes Numériques ( Michel Betton

Licence GMI cours de Méthodes Numériques ( Michel Betton )
IUP GMI – Université d’Avignon et des Pays de Vaucluse Page 1
Méthodes Numériques :
Applications concrètes ( sur machine ) de résultats d’analyse numérique.
1/ Soit résolution de manière analytique ( solution analytique ) : solution sous forme de formule
Exemple : Equation du second degré
ax2 + bx + c = 0
0
2
b
xa
2/ Soit solution numérique
Exemple :
?
x
ex
x
y=x
x
ye
C’est une approximation du résultat exact. En général, en créant une suite qui converge
vers la solution ( limite ) .
Exemple :
2
1
0?
x
e dx
Calcul numérique
3/ Solution analytique connue mais calculs trop longs
Problèmes de résolution de systèmes d’équations linéaires
Problèmes de résolution d’équations différentielles

Licence GMI cours de Méthodes Numériques ( Michel Betton )
IUP GMI – Université d’Avignon et des Pays de Vaucluse Page 2
Problèmes posés par le « passage » sur machine :
1/ Notation d’infini, de continuité
- Erreur d’affectation (la machine travaille avec un nombre fini de chiffres significatifs)
- Erreur de cancellation ( différence de valeurs très grande ou très petites )
Exemple :
x a x
ya
avec a donné

Licence GMI cours de Méthodes Numériques ( Michel Betton )
IUP GMI – Université d’Avignon et des Pays de Vaucluse Page 3
RESULTATS D’ANALYSE A CONNAITRE :
Fonction d’une variable réelle
- Domaine de définition
- Etude de fonction
- Calculer une dérivée
- calculer une primitive
- Limite
- Continuité
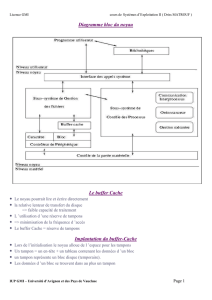
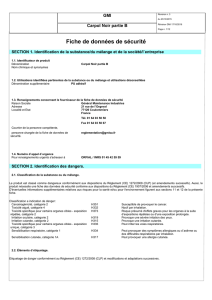
Dérivée :
Définition :
Limite, si elle existe,
( ) ( )f x h f x
h
quand
0h
( Pas d’hypothèse sur le signe de h )
Limite
y
x
avec
0
0
x
x
y
x
: pente de la droite ( D ) en M : tangente
=
'( )fx
( valeur de la pente de la tangente en M )
'( ) ( )
y
f x x
x
avec
()x
fonction qui tend vers 0 quand
0x
x
y
y
M
p
f(x+h)
f(x)
x
x+h
x
accroissement algébrique
de la fonction
accroissement algébrique
de la variable
(D)

Licence GMI cours de Méthodes Numériques ( Michel Betton )
IUP GMI – Université d’Avignon et des Pays de Vaucluse Page 4
'( ) ( )
y
f x x
x
Application : si
x
« petit » voisin de 0 => on peut approcher
'( )fx
par
y
x
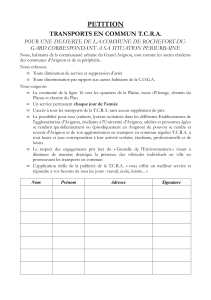
Exemple : Calcul numérique de la dérivée de
sin x
sur [ 1 2 ]
Choix de h =
x
: pas du calcul
Données ( dont on a besoin )
fonction f(x)
x départ a=
x arrivée b=
pas du calcul h=
Période d’écriture T=
écrire « x dérivée » exacte »
x= a
C= T
Calcul de deriv y =
( ) ( )f a h f a
h
Si C = T
écrire x , deriv y , cos x
C = 0
On ajoute h à x
On ajoute 1 à C
Si x
b on revient à
sinon fin
On sait que
'( )fx
= cos x
donc on peut comparer les résultats numériques et analytique
( En rouge dans le pseudo-algorithme )
*
*

Licence GMI cours de Méthodes Numériques ( Michel Betton )
IUP GMI – Université d’Avignon et des Pays de Vaucluse Page 5
'( ) ( )
( ) ( )
'( ) ( )
( ) ( ) '( ) ( )
y
f x x
x
f x x f x
f x x
x
f x x f x xf x x x
Approximation
( ) ( ) '( )f x x f x xf x
: calcul des petites variations
Intérêt de cette formule : dans les applications pratiques
Exemple :
2L
Tg
L = 1 m g=9.81 m/s2
En faisant varier L légèrement
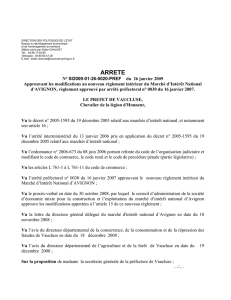
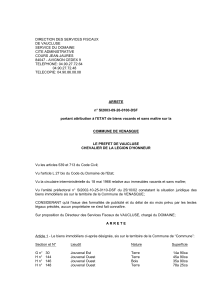
Différentielle :
Définition :
'( ) dy
fx dx
dy : différentielle de y
dx : différentielle de x
Analysons le cas où
x dx
'( ) ( )
y
f x x
x
avec
x dx
( condition supplémentaire )
=>
()
dy y x
dx x
R
(T)
x
y
y
M
P
f(x+h)
f(x)
x
x+h
dx
dy
x
accroissement algébrique
de la fonction
accroissement algébrique
de la variable
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
1
/
73
100%