0910-1S-compo1-correction

NOM : 16 novembre 2009
CORRECTION - COMPOSITION n° 1
1S
Durée : 3h00 Calculatrice autorisée
PHYSIQUE
Exercice 1
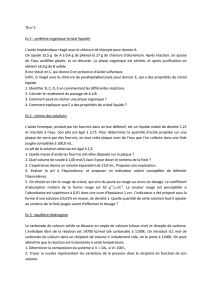
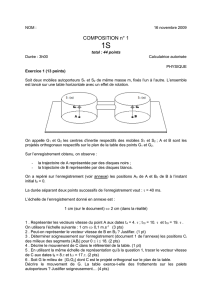
1 . Représenter les vecteurs vitesse du point A aux dates :
t4 = 4. ; t10 = 10. et t19 = 19.
On mesure sur le document :
A3A5 = 4,3 cm soit dans la réalité : A3A5 = 8,6 cm
A9A11 = 5,0 cm soit dans la réalité : A9A11 = 10,0 cm
A18A20 = 1,6 cm soit dans la réalité : A18A20 = 3,2 cm
V4 A3A5 / 2 = 8,6.10-2 / 80.10-3 = 1,1 m.s-1
V10 A9A11 / 2 = 10,0.10-2 / 80.10-3 = 1,3 m.s-1
V19 A18A20 / 2 = 3,2.10-2 / 80.10-3 = 0,40 m.s-1
On représente les vecteurs vitesse tangents à la trajectoire, orientés dans le sens du
mouvement.
Longueur de V4 : 11 cm / Longueur de V10 : 13 cm / Longueur de V19 : 4 cm
2 . Peut-on représenter le vecteur vitesse de B en B0 ? Justifier.
On estime la vitesse instantanée du point mobile B à la date ti lorsqu’il passe en Bi en
calculant la vitesse moyenne du mobile entre les dates ti-1 et ti+1 lorsqu’il parcourt la distance
Bi-1Bi+1 sur sa trajectoire.
Cette estimation est valable tant que t = ti+1 – ti-1 reste faible, ce qui est la cas ici puisque t
= = 40 ms.
Ne pouvant pas encadrer le point B0 avec une position antérieure du mobile, le calcul de V0
est impossible.
3 . Déterminer soigneusement sur l’enregistrement (document 1 de l’annexe) les
positions Ci des milieux des segments AiBi pour 0 i 18.
Voir document en annexe
4 . Décrire le mouvement de C dans le référentiel de la table.
Le mouvement du point C semble être rectiligne et uniforme. En effet, les points Ci sont
alignés et la distance CiCi+1 demeure presque constante au cours du mouvement.
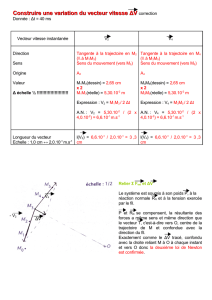
5 . En utilisant la même échelle de représentation qu’à la question 1, tracer le vecteur
vitesse de C aux dates t8 = 8. et t17 = 17..

On mesure sur le document :
C7C9 = 2,3 cm soit dans la réalité : C7C9 = 4,6 cm d’où : V(C)8 = C7C9 / 2 = 5,8.10-1 m.s-1
C16C18 = 2,3 cm d’où : V(C)17 = V(C)8 = 5,8.10-1 m.s-1
Les vecteurs font tous deux 5,8 cm de long en tenant compte de l’échelle prescrite.
6 . Soit G le milieu de G1G2 dont C est le projeté orthogonal sur le plan de la table.
Décrire le mouvement de G.
La table exerce-t-elle des frottements sur les palets autoporteurs ?
Dans le référentiel de la table, G a un mouvement rectiligne uniforme. Le principe d’inertie
permet d’affirmer que le système S1S2 est soumis à des forces extérieures qui
compensent leurs effets.
Bilan des forces extérieures agissant sur le système S1S2 :
Solide S1 : P1, son poids et R1, la réaction du support ;
Solide S2 : P2, son poids et R2, la réaction du support.
P1 et P2 sont verticaux, orientés vers le centre de la terre.
Si R1 compense P1 et R2 compense P2, cela signifie que R1 et R2 sont deux vecteurs
verticaux, orientés vers le haut.
De plus, on doit vérifier que P1 = R1 et P2 = R2.
On sait que la réaction du support est un vecteur que l’on peut décomposer en une
composante normale (ici verticale car la table est horizontale) qui empêche le palet de
s’enfoncer dans la table et une composante tangentielle qui représente les frottements
exercés par la table sur le palet.
Si les réactions R1 et R2 sont verticales, cela signifie que les composantes tangentielles sont
nulles. Il n’y a donc pas de frottements.
En fait, ils existent mais sont négligeables par rapport aux autres forces.

Exercice 2
I . Type A : lecture à vitesse linéaire constante.
Un dispositif de contrôle assure que la vitesse linéaire de chaque point d’une piste est
exactement égale à 1,2 m.s-1 au moment de sa lecture, lorsque le laser l’illumine.
1 . Donner la relation entre la vitesse d’un point du disque et la vitesse de rotation de
ce dernier. Préciser les unités utilisées dans le système international.
Soit VP la vitesse linéaire d’un point P quelconque du disque (m.s-1)
Soit la vitesse de rotation du disque (rad.s-1)
On a : VP = RP .
où RP est la distance qui sépare le point P du centre de rotation (centre du disque).
2 . Calculer la vitesse angulaire de rotation du disque lorsque le laser parcourt la
première piste ; lorsqu’il parcourt la dernière piste.
Lorsque la première piste (r = 22,1 mm) est parcourue, le dispositif de contrôle assure que la
vitesse linéaire d’un point P quelconque de cette piste soit égale à VP = 1,2 m.s-1.
On a donc : = : VP / RP = VP / r = 1,2 / 22,1.10-3 = 5,4.101 rad.s-1
3 . Les lecteurs de cédérom ont tendance à vibrer davantage lorsque la vitesse de
rotation du disque est élevée. Les vibrations sont source de bruit. Le lecteur est-il plus
bruyant en début ou en fin de lecture ?
Comparons les vitesses de rotation du disque lorsque le lecteur laser parcourt une piste
proche du centre de rotation et lorsqu’il parcourt une piste éloignée :
Soit P1 un point appartenant à une piste de rayon R1 et P2 un point appartenant à une piste
de rayon R2 : Supposons que R1 < R2.
Soient V1 et V2 les vitesses linéaires des points P1 et P2. En type de lecture A, le dispositif de
contrôle assure que V1 = V2 .
Soient 1 et 2 les vitesses de rotation du disque lorsqu’il lit la piste 1 puis la piste 2.
On a : 1 = V1 / R1 et 2 = V2 / R2
1 / 2 = V1 .R2 / R1 . V2 = R2 / R1
1 / 2 > 1 donc 1 > 2
Conclusion : le lecteur vibre davantage en début de lecture.
4 . Sur une piste, 1 bit de données correspond à un alvéole de longueur 0,278 m.
Quelle est la durée nécessaire pour la lecture d’une information de 1 octet ?

La vitesse linéaire de déplacement d’un alvéole est V = 1,2 m.s-1 au moment de sa lecture,
lorsque le laser l’illumine. Soit t le temps mis par le laser pour illuminer l’alvéole sur toute sa
longueur. Soit d = 0,278 m la longueur d’un alvéole.
On nomme T le temps de lecture d’un octet.
On a : V = d / t d’où : T = 8 . t = 8 . d / V = 8 . 0,278.10-6 / 1,2 = 8 . 2,3.10-7 s
T = 1,84.10-6 s
II . Type B : lecture à vitesse de rotation constante.
Une autre technologie de lecture des cédéroms consiste à faire tourner le disque avec une
vitesse angulaire de rotation constante et égale à 400 tours par minute.
1 . Pourquoi dans ce cas, la vitesse de lecture d’un alvéole n’est-elle pas la même
lorsqu’on change de piste ?
Soit P1 un point appartenant à une piste de rayon R1 et P2 un point appartenant à une piste
de rayon R2 : Supposons que R1 < R2.
Soient V1 et V2 les vitesses linéaires des points P1 et P2.
Soient 1 et 2 les vitesses de rotation du disque lorsqu’il lit la piste 1 puis la piste 2.
En type de lecture B, le dispositif de contrôle assure que 1 = 2 .
On a : 1 = V1 / R1 et 2 = V2 / R2
1 = 2 donc V1 / R1 = V2 / R2 soit V1 / V2 = R1 / R2
Or R1 < R2 donc V1 < V2
En type de lecture B, les vitesses linéaires des points appartenant à chaque piste sont
croissantes lorsque le laser se déplace du centre du disque vers sa périphérie.
2 . Calculer la vitesse linéaire de lecture sur la première piste puis sur la dernière
piste.
Exprimons la vitesse de rotation du disque en radians par seconde :
400 tr 1 minute
400.2 rad 60 secondes
= 400.2 / 60 rad.s-1
Pour un point appartenant à la première piste :
V1 = r. = 22,1 .10-3 . 400. 2 / 60 = 9,3.10-1 m.s-1
Pour un point appartenant à la dernière piste :
V2 = R. = 58,1 .10-3 . 400. 2 / 60 = 2,4 m.s-1

CHIMIE
Exercice 3
Le dioxyde de carbone est un gaz naturellement présent dans l’atmosphère. Il se dissout
dans l’eau des océans, où il entre dans un cycle de transformation qui aboutit entre autres à
la formation des coquilles calcaires de nombreux organismes aquatiques.
1. Dissolution du dioxyde de carbone dans l’eau.
Le dioxyde de carbone gazeux se dissout dans l’eau selon l’équation de dissolution :
CO2,H2O
HCO3(aq)
H
(aq)
La solubilité du dioxyde de carbone dans l’eau est très importante : en effet, on peut
dissoudre 88 mL de dioxyde de carbone gazeux dans 100 mL d’eau à la pression standard
de 1013 hPa et à 25°C.
1.1. Déterminer la quantité de matière de dioxyde de carbone gazeux qui peut être
dissous dans 100 mL d’eau dans ces conditions.
n(CO2) = P.V / R.T = 1013.102.88.10-6 / 8,314.298 = 3,6.10-3 mol
1.2. En déduire la concentration en soluté apporté lorsque la solution est saturée en
dioxyde de carbone dissous.
On a vu à la question précédente qu’il est possible de saturer un volume de 100 mL d’eau en
y dissolvant 3,6.10-3 mole de dioxyde de carbone dans les conditions de température et de
pression précisées dans l’énoncé. La concentration molaire en soluté apporté d’une solution
saturée en dioxyde de carbone est donc :
C = 3,6.10-2 mol.L-1
1.3. Déterminer la concentration effective en ions hydrogénocarbonate et en ions
hydrogène à saturation.
D’après l’équation de dissolution du dioxyde de carbone gazeux dans l’eau, on voit que la
dissolution d’une mole de CO2 aboutit à une mole d’ions hydrogénocarbonate et une mole
d’ions hydrogène.
Par conséquent : HCO3- = H+ = C = 3,6.10-2 mol.L-1
2. Formation de la coquille des crustacés et des mollusques.
De nombreux organismes marins fabriquent leurs coquilles à partir des ions
hydrogénocarbonate dissous dans l’eau. La sécrétion du carbonate de calcium qui constitue
la coquille est en fait le résultat d’une transformation chimique.
L’équation de réaction menant à la synthèse du carbonate de calcium par l’organisme vivant
est :
Ca2
(aq)2HCO3(aq)
CaCO3(s)CO2(g)
H2O(l)
 6
7
8
6
7
8
1
/
8
100%