cours n° 6

Page 1 sur 15
Cours N° 6 :
Les Asservissements
DÉROULEMENT DE LA SÉANCE
TITRE
ACTIVITÉS PROF
ACTIVITÉS ÉLÈVES
MOYEN
DURÉE
Fin du cours {? heures}

Page 2 sur 15
Tableau de comité de lecture
Date de lecture
Lecteurs
Observation
Remarques rédacteur
Date modifications
8 mai 2001
CROCHET David
Première version + Améliorations mineures
8 mai 2001
Quote of the day :
Fournir ma contribution aux autres est ma philosophie.
Et la vôtre ?
Si vous avez lu ce T.P. et que vous avez des remarques à faire, n'hésiter pas et écrivez-moi à l'adresse suivante :
Ce dossier contient :
Un dossier élève (pages 4 à -)
Un dossier prof (pages - à -)
Un transparent (page - à - )
E-Mail :
Crochet.davi[email protected]
Adresse Professionnel :
CROCHET David
Professeur de Génie électrique
Lycée Joliot CURIE
Place du Pigeon Blanc
02500 HIRSON
(Adresse valable jusq'au 30 juin 2002

Page 3 sur 15
Cours N° 6
Les Asservissements
Niveau : 1 STI GET
Lieu : Salle de cours
Durée : ? heures
Organisation : groupe ½ classe, travail individuel
LIAISON AU RÉFÉRENTIEL
B 1 CHAPITRE 3 (Représentation de l'information)
PRÉ-REQUIS
Les élèves doivent être capables :
-
-
OBJECTIFS
Les élèves devront être capables de :
-
-
NIVEAU D'APPRENTISSAGE
- Apprendre à (savoir intégré)
- Apprendre à (savoir actif)
MÉTHODE
- Passive

Page 4 sur 15
S.T.I. - G.E.T.
B 1 – AUTOMATIQUE ET INFORMATIQUE
INDUSTRIELLE
COURS N° 6
LES ASSERVISSEMENTS
DOSSIER PÉDAGOGIQUE
L
Le
es
s
A
As
ss
se
er
rv
vi
is
ss
se
em
me
en
nt
ts
s
Objectif :
Matériel :
Documents :
Aucun document autorisé
Secteur : Salle de cours Durée : ? heures
Nom, Prénom : Classe, Groupe :

Page 5 sur 15
Les Asservissements
1. Principe
Le maintien à une valeur constante d'une température, d'une vitesse ou d'une
pression, nécessite de mesurer la valeur réelle de la grandeur commandée et d'en
informer le système pour qu'il réagisse dans le sens souhaité. C'est le principe de
l'asservissement ou boucle fermée.
Le système doit réagir dès qu'une perturbation est détectée (différence entre l'état
souhaité et l'état mesuré), afin de compenser l'effet de cette perturbation.
Le régulateur est un dispositif qui consiste à maintenir une grandeur physique à
une valeur fixée à l'avance. L'asservissement est un dispositif qui consiste à
appliquer une loi de variation à une ou plusieurs grandeurs physique.
Exemple :
- Régulation de la température à 800 °C
- Asservissement de position d'un chariot en fonction de la valeur affichée
(consigne)
La commande en boucle fermée peut s'appliquer aux systèmes automatiques, en
particulier pour les grandeurs :
- Mécaniques (vitesse couple, force)
- Hydrauliques (pression, niveau, débit)
- Thermiques (températures, quantité de chaleur)
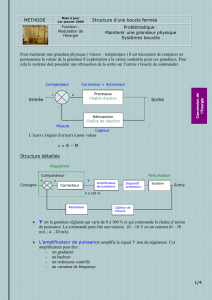
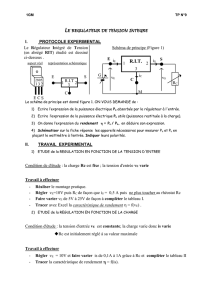
2. Structure d'une boucle fermée
2.1. Chaîne directe, chaîne inverse
2.1.1. Chaîne directe
Elle permet de corriger les effets d'une perturbation sur le système. Elle se
compose du comparateur, du correcteur, de l'amplificateur et de l'actionneur.
2.1.2. Chaîne inverse
La chaîne inverse, ou encore boucle de retour, boucle de rétroaction, boucle de
réaction, surveille en permanence l'état du système pour en informer le régulateur
affin d'apporter sur la boucle directe les modifications voulues.
Partie opérative
Capteur
de
position
Ordre
d'action
Position mesurée (rétroaction)
Partie commande
Amplificateur et
préactionneur
Écart de
position
Consigne
de position
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%