Document

METHODE
Mise à jour
1er janvier 2005
Structure d’une boucle fermée
Fonction :
Modulation de
l’énergie
Problématique :
Maintenir une grandeur physique
Systèmes bouclés
_ 1/4
Conversion de
l’Energie
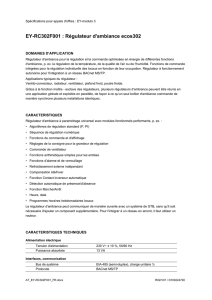
Pour maintenir une grandeur physique ( vitesse – température ) il est nécessaire de comparer en
permanence la valeur de la grandeur d’exploitation à la valeur souhaitée pour ces grandeurs. Pour
cela le système doit posséder une rétroaction de la sortie sur l’entrée ( boucle de commande)
Comparateur Correcteur + Actionneur
+
Entrée Sortie
-
Mesure
Capteur
L’écart (signal d’erreur) à pour valeur
= E – M
Structure détaillée
Régulateur
Comparateur Perturbation
+ Y
Consigne Sortie
-
0 à 100 %
Y est la grandeur réglante qui varie de 0 à 100 % et qui commande la chaîne d’action
de puissance. La commande peut être une tension (0 – 10 V ou un courant (0 – 20
mA ; 4 – 20 mA)
L’amplificateur de puissance amplifie le signal Y issu du régulateur. Cet
amplificateur peut être :
- un gradateur
- un hacheur
- un redresseur contrôlé
- un variateur de fréquence
Processus
Chaîne d’action
Rétroaction
Chaîne de réaction
Correcteur
Amplificateur
de puissance
Dispositif
actionneur
Système
Capteur de
mesure
Adaptateur

METHODE
Structure d’une boucle fermée
2/4
Conversion de
l’Energie
Le dispositif actionneur agit sur le système ; L’actionneur peut être :
- un moteur
- une résistance de chauffage
- une lampe (halogène)
Le capteur et l’adaptateur :
- Le capteur mesure la grandeur physique
- L’adaptateur transforme le signal de mesure en une tension ou un courant
Fonction de transfert
On désigne par fonction de transfert le rapport de la grandeur de sortie sur la grandeur d’entrée.
E S
E
S
K
En cascade
E S
321 KKK
E
S
K
E S
Différents types de régulateurs
Régulateur TOR
Ce type de régulateur délivre soit toute la puissance, soit aucune puissance. La précision de
ce type de régulateur est faible, on l’utilise par exemple pour les radiateurs électriques.
Pour optimiser la régulation et obtenir la meilleur précision, la meilleure rapidité et la
meilleur stabilité on utilise un régulateur avec trois types de commande :
- P pour action proportionnelle
- I pour action intégrale
- D pour action dérivée
K
K3
K2
K1
K1xK2xK3

METHODE
Structure d’une boucle fermée
3/4
Conversion de
l’Energie
Régulateur à action proportionnelle P
Régulateur
Comparateur
+ Y= K x
Consigne Sortie
-
Amplificateur
La sortie du régulateur est proportionnelle à l’erreur
Ce type de régulateur permet une action immédiate.
Plus la valeur du gain est élevée, plus l’erreur statique diminuera.
Un gain trop fort risque de rendre le système oscillant, donc instable.
Régulateur à action proportionnelle intégrale PI
Régulateur
Comparateur
+ Y= K x
Consigne Sortie
-
Amplificateur
L’action proportionnelle élimine l’erreur statique mais le système devient plus lent.
P
actionneur
r
Capteur de
mesure
P
actionneur
r
Capteur de
mesure

METHODE
Structure d’une boucle fermée
4/4
Conversion de
l’Energie
Régulateur à action dérivée
Régulateur
Comparateur
dt tdK
TdY
+
Consigne Sortie
-
Amplificateur
L’action dérivée a un effet d’anticipation qui permet d’augmenter la rapidité du régulateur
Régulateur à action proportionnelle intégrale dérivée
Régulateur
Comparateur
+
Consigne Sortie
-
Amplificateur
L’action PID permet d’obtenir de très bonnes qualités de précision et de rapidité sans instabilité.
Le réglage d’un régulateur PID est un compromis qui nécessite d’optimiser les effets correcteurs
de chacune des actions
PD
actionneur
r
Capteur de
mesure
PID
actionneur
r
Capteur de
mesure
1
/
4
100%