Théorie Bayesienne de la décision

Théorie Bayesienne de la décision
Alain Rakotomamonjy - Gilles Gasso
.
INSA Rouen -Département ASI
Laboratoire LITIS
Théorie Bayesienne de la décision – p. 1/17

Introduction par l’exemple
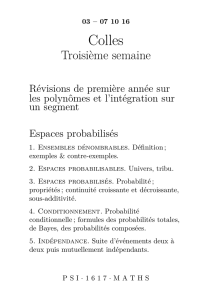
On cherche à savoir si un pixel vient de la zone 1 (sombre) ou de la zone 2 (clair)
avec le moins d’erreur possible.
•Que faire sans information?
•Que faire si on a l’information de luminance d’un point?
50 100 150 200 250
50
100
150
200
250
Si on a aucune information a priori,
affecter un pixel à la zone 1 permet de
minimiser l’erreur.
Théorie Bayesienne de la décision – p. 2/17

Introduction par l’exemple
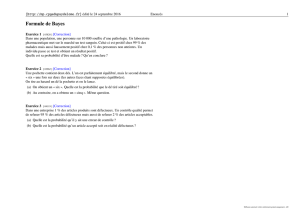
•On a l’information de luminance x. v.a de loi pX(x)
•Probabilité conditionnelle de x:p(x/C1)et p(x/C2)
•Probabilité a priori de la classe Ck: Pr(Ck)
•On affecte xà la classe de plus forte probabilité a posteriori Pr(Ck/x).
0 50 100 150 200 250
0
0.005
0.01
0.015
0.02
0.025
0.03 Densité de probabilité conditionnelle de la luminance en fonction de la source
p(x|C1)
p(x|C2)
p(x)
0 50 100 150 200 250
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Densité de probabilité a posteriori de la source en fonction de la luminance
p(C1|x)
p(C2|x)
pX(x) = p(x/C1)Pr(C1) + p(x/C2)Pr(C2)
Théorie Bayesienne de la décision – p. 3/17

Objectifs
•On observe un ensemble de caractéristiques décrivant une entité
•On suppose qu’une entité provient d’une source (ou classe) donnée
•On réalise une action en fonction de l’observation des caractéristiques
•Sachant que chaque action a un certain coût en fonction de la source émettant la
caractéristique observée, l’objectif est de :
Trouver une règle qui minimise un coût moyen, définissant quelle action effectuer
en fonction de l’entité observée
Théorie Bayesienne de la décision – p. 4/17

Définitions et Notations
•Ensemble des classes {C1,··· ,CK}de loi a priori pour chaque classe Pr(Ck)
•Espace des caractéristiques X, typiquement X=Rd
•Loi a posteriori Pr(C=Ck/X =x)
•Probabilité conditionnelle de xen fonction d’une classe Ck:p(x/CK)
•Probabilité inconditionnelle de x:pX(x) = PK
k=1 p(x/Ck)Pr(Ck)
•Ensemble des actions A={a1,··· , am}
Typiquement, les actions consistent à affecter une classe à une observation
donnée et donc le nombre d’actions est égal au nombre de classes.
•Coût ℓjk =ℓ(aj,Ck)associé à l’action ajsachant que l’observation est issue de
Ck.
Théorie Bayesienne de la décision – p. 5/17
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%