Chapitre4

1
Biomécanique
Biomécanique
Chapitre 4
Modélisation, système de mesure et
calculs

2
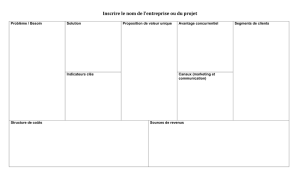
Introduction
La complexité des systèmes réels nous contraint le plus
souvent à les simplifier afin d’être en mesure de répondre
aux questions et aux problèmes qu’ils soulèvent
Pour cela, on substitue au système réel une représentation
physique plus simple que l’on appelle modèle du système
réel
L’enjeu de la modélisation est de faire fonctionner des outils
existants pour aider la compréhension des phénomènes étudiés

3
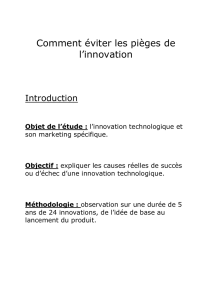
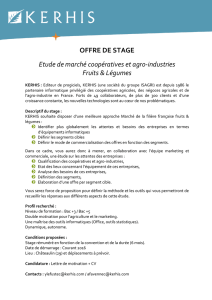
Quel modèle pour le corps humain ?
L’être humain est composé d’un ensemble de segments
corporels plus ou moins indéformables reliés les uns aux autres
par des articulations
Le modèle choisi pour le corps humain est donc constitué de
14 segments rigides ou indéformables poly articulés,
on parle alors de modèle multicorps rigides
Les segments corporels sont aussi délimités par des repères
anatomiques

4
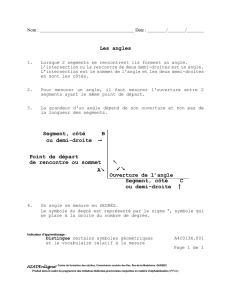
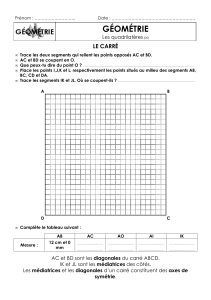
Modèle du corps humain
Le modèle est composé des
14 s
egments rigides
:
Pieds : bout du pied – cheville
Jambes : cheville – genou
Cuisses : genou – hanche
Tronc : milieu des hanches – milieu des épaules
Bras : épaule – coude
Avant - bras : coude – poignet
Mains : poignet – bout des doigts
Tête : cou – sommet du crâne

5
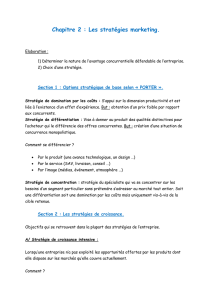
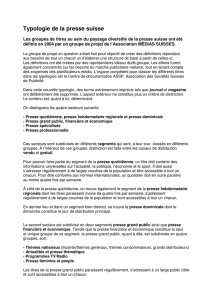
Repères anatomiques
Sommet crâne
7ème cervicale
Axe glénohuméral
Trochlée humérale
Apophyse styloïde cubital
2ème phalange du médium
Grand trochanter
Condyle fémoral
Malléole externe
2ème métatarsien
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%