Corrigé - IMJ-PRG

UPMC Master 1 Math´ematiques 2013
Corrig´e de la Feuille de TD 3 de Revˆetements et Groupe
Fondamental
Groupes et Revˆetements
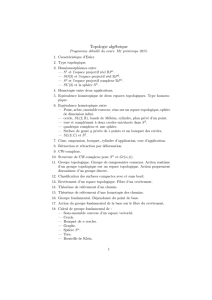
Rappelons la d´efinition de revˆetement vue en cours (et dans le poly). Un revˆetement d’un espace
topologique Bpar (un espace topologique) Xest la donn´ee d’une application continue p:X→B
telle que, pour tout point b∈B, il existe un voisinage Ubde b(dans B), un espace discret Fbnon-vide
et un hom´eomorphisme φ:p−1(Ub)→Ub×Fbrendant le diagramme
p−1(Ub)φ//
p
##
Ub×Fb
π
{{
Ub
(1)
commutatif (ici πest la projection sur Ub). Les ouverts de la forme Ubs’appelle des ouverts trivialisants
du revˆetement. Une section locale est une application continue s:V→E, o`u Vest un ouvert 1dans
B, telle que p◦s=id. L’ensemble Fb∼
=p−1({b}) s’appelle la fibre de b. On prendra garde que
l’hom´eomorphisme φn’est pas unique en g´en´eral (alors que Fbest unique `a bijection pr`es). Tr`es
souvent on fera un abus consistant `a ne pas ´ecrire l’indice bdans Ubou Fb...
Exercice 1. (Quelques propri´et´es des revˆetements)
Soit p:E→Bun revˆetement. Montrer que
1. La projection pest surjective.
2. Si Eest compact (resp. connexe, connexe par arcs), alors Best compact (resp. connexe, connexe
par arcs).
3. Si Best s´epar´e, alors Eest s´epar´e.
4. Si A⊂Best un sous-espace alors p|p−1(A):p−1(A)→Aest un revˆetement.
5. Si Best connexe et si pa une fibre finie alors toutes les fibres de pont le mˆeme cardinal.
6. Si Best compact, alors Eest compact si et seulement si les fibres de psont finies.
7. Un revˆetement est un hom´eomorphisme local et r´eciproquement, si Eest s´epar´e et si pest
un hom´eomorphisme local tel que les fibres soient finies et de mˆeme cardinal alors pest un
revˆetement.
Solution 1. 1. La surjectivit´e provient du fait que, dans la d´efinition donn´ee en cours, on suppose
les fibres non-vides. En particulier p−1({b})∼
=Fest non-vide. Ceci force aussi l’existence de
sections locales. En effet, pour tout b∈B,Ubvoisinage trivialisant et tout point f∈Fb, on peut
d´efinir une section sf:Ub→Epar la formule sf(x) = φ−1((x, f)) qui v´erifie p◦sf=id puisque
le diagramme (??) est commutatif.
2. Le seul point d´elicat est de montrer que Es´epar´e implique que Best s´epar´e. Ux,Uydeux
voisinages trivialisants et e∈p−1({x}) , f∈p−1({y}) deux de leurs ant´ec´edents. En particulier
e6=f(puisque p(e) = x6=y=p(f)). Comme Eest s´epar´e, il en r´esulte qu’il existe des
voisinages ouverts disjoints Ve,Vfde eet f. Quitte `a regarder les restrictions Ve∩p−1(Ux) et
Vf∩p−1(Uy), on peut supposer que Ve,Vfsont dans p−1(Ux) et p−1(Uy). Comme la projection
π:Ux×Fx→Uxest ouverte et que φest un hom´eomorphisme (donc est ouverte), il suit alors
que p(Ve) et p(Vf) sont ouverts. Il reste `a voir qu’ils sont disjoints ce qui est trivial si les ouverts
1. ou un voisinage, c’est `a dire une partie d’int´erieur non-vide
1

trivialisants Uxet Uysont disjoints 2. Sinon, on a deux trivialisations diff´erentes sur l’intersection
Ux∩Uy(donn´ee par φx:p−1(Ux∩Uy)→Ux∩Uy×Fet φy:p−1(Ux∩Uy)→Ux∩Uy×F) et
comme la fibre Fest discr`ete on peut supposer (quitte `a restreindre) que φx(Ve) est inclus dans
une seule “assiette” Ux× {a}et que φy(Vf) est inclus dans une seule assiette Uy× {b}avec b6=a
puisque Ve6=Vf. Ceci garantit bien que p(z)6=p(z0) si z∈Ve,z0∈Vfet donc que les ouverts
p(Ve) et p(Vf) s´eparent xet y.
La compacit´e de Bd´ecoule alors de la surjectivit´e de pet du fait que l’image d’un compact par
une application continue `a valeur dans un espaces s´epar´e est un compact. Enfin l’image continue
d’un connexe (resp. connexe par arcs) est un connexe (resp. connexe par arcs).
3. Montrons maintenant que Bs´epar´e implique aussi que Eest s´epar´e. En effet, soit x6=ydans E.
Si p(x)6=p(y) dans B, il existe des voisinages disjoints Ux,Uyde p(x) et p(y). Alors p−1(Ux) et
p−1(Uy) sont ouverts (par continuit´e de p), clairement disjoints et s´eparent donc xet y. Si p(x) =
p(y), on consid`ere un ouvert trivialisant Ude p(x). Il existe alors e6=fdans F=p−1({p(x)}) tel
que x=φ−1(x, e) et y=φ−1(x, f). Mais alors φ−1(U× {e}) et φ−1(U× {f}) sont des ouverts 3
disjoints qui s´eparent xet y.
4. C’est facile en remarquant que si Uest un ouvert trivialisant, alors U∩Aest un ouvert de A
trivialisant puisque p−1(U∩A) = p−1(U)∩p−1(A).
5. on consid`ere l’application c:B→Nqui `a un point bassocie le cardinal c(b) de la fibre p−1(b).
Par d´efinition d’un revˆetement, cette application est localement constante (donc continue). En
effet, si Ubest un ouvert trivialisant contenant b, c’est aussi un ouvert trivialisant pour tout point
x∈Ubet il suit que toutes les fibres p−1({x}) sont isomorphes `a Fbdans Ub; en particulier, elles
ont le mˆeme cardinal. Comme Nest discret et Bconnexe, le r´esultat d´ecoule.
6. Si Eest compact, la pr´e-image par pde tout point b∈Best ferm´ee 4dans Edonc compact.
Comme p−1({b}) est discret, il suit qu’il est fini.
R´eciproquement, supposons que les fibres sont finies. Comme Best compact, il est s´epar´e et
donc Eaussi par la question 3). Par compacit´e de B, il existe un recouvrement fini de Bpar
des voisinages trivialisants, que l’on peut supposer compact 5quitte `a les restreindre. On note
Ki, φi:p−1(Ki)→Ki×Fi(i∈ {1, . . . , m}) un telle famille finie. Comme les fibres Fisont finies
(et discr`etes), elles sont compactes et la r´eunion disjointe `m
i=1 Ki×Fil’est aussi. Soit alors
q:`m
i=1 Ki×Fi→El’application d´efinie par q(x, f) = φ−1
i(x, f) si (x, f)∈Ki×Fi. Il est clair
que qest continue et surjective. Comme Eest s´epar´e, on en d´eduit alors qu’il est compact.
7. Qu’un revˆetement soit un hom´eomorphisme local est imm´ediat d’apr`es la d´efinition. Il suffit
de consid´erer un ouvert trivialisant Ubet la restriction de p`a φ−1(Ub× {f}) pour le choix de
n’importe quel ´el´ement f∈Fb. On laisse les d´etails au lecteur.
R´eciproquement, supposons Es´epar´e et soit nle cardinal des fibres de p. En particulier, on peut
identifier p−1({b}) avec l’ensemble {1, . . . , n}pour tout b∈B. Par ´enonc´e, pour tout b∈Bet
e∈p−1({b}), il existe des voisinages Ve⊂E,Ue⊂Bde e,btel que la restriction de p`a Vesoit
un hom´eomorphisme p|Ve:Ve→Uede Vesur Ue. On note e1, . . . , enles points de la fibre de b.
Comme Eest s´epar´e, quitte `a restreindre (en prenant les intersections avec des voisinages qui
s´eparent les ei), on peut supposer les Veideux `a deux disjoints. Comme une intersection finie
d’ouvert est ouverte, U:= Tn
i=1 Ueiest un ouvert et (la restriction de) pest un hom´eomorphisme
de Vi:= Vei∩p−1(U) sur Upour tout i∈ {1, . . . , n}. Soit ψ:U× {1, . . . , n} → p−1(U)
l’application induite par les hom´eomorphismes p|Vi
−1:U×{i}∼
=U→Vi. Par construction cette
application est injective (car les Visont 2 `a 2 disjoints) et un hom´eomorphisme sur son image
(qui est `Vi). De plus p◦ψcoincide avec la projection U× {1, . . . , n} → U. Il reste `a voir que
2. auquel cas on pouvait conclure tout de suite bien sur...
3. on utilise encore que Fest discret
4. car Bcompact implique que les points sont ferm´es, comme pour tout espace s´epar´e d’ailleurs
5. on rappelle qu’un espace compact est lcoalement compact, donc tout voisinage contient un voisinage compact. Cf.
le cours de topologie g´en´erale, ce n’est pas compl´etement trivial !
2

ψest surjective pour conclure que c’est un hom´eomorphisme et donc que p:E→Best un
revˆetement. Mais pour tout y∈U,p−1({y}) est de cardinal net ψ({y}×{1, . . . , n})⊂p−1({y})
fournit n´el´ements distincts. D’o`u la surjectivit´e.
Exercice 2. (Revˆetements sur C)
1. Montrer que exp : C→C∗est un revˆetement. Est-il trivial ?
2. Montrer que z7→ z2est un revˆetement de C\ {0}sur C\ {0}. Est-ce un revˆetement de Csur C?
3. Soit P:C→Cun polynˆome complexe et F⊂Cl’ensemble de ses valeurs critiques (F=
{P(w), P 0(w)=0}). Montrer que P|C\P−1(F):C\P−1(F)→C\Fest un revˆetement de degr´e
deg(P).
4. Soit Cn={(z1, . . . , zn)∈Cn,tels que zi6=zjpour i6=j}et Pn={X⊂C,tel que Card(X) =
n}. Montrer que l’application φ:Cn→Pnd´efinie par φ(z1, . . . , zn) = {z1, . . . , zn}est un
revˆetement.
Solution 2. 1. Rappelons que exp(x) = exp(y) si et seulement si x=y+ 2iπn. Soit b∈C∗.
On choisit une boule (donc connexe) ouverte Ucontenant bet incluse dans C∗priv´e d’une
demi-droite. On a alors une d´etermination continue Log du logarithme sur cet ouvert. Et de
plus (voir la feuille de TD 1), deux d´eterminations diff´erent d’un multiple entier de 2iπ ; en
particulier. Il suit que l’on a un hom´eomorphisme ψ:U×Z→p−1(U) donn´ee par ψ(u, n) =
Log(u) + 2inπ. L’application ψest clairement continue et injective (puisque u7→ Log(u) l’est).
De plus, elle est surjective par le rappel ci-dessus. Enfin elle a un inverse ´evident donn´e par
v7→ (exp(v),1
2iπ v−Log(exp(v))). Cette derni`ere application est bien continue puisque le
logarithme l’est. On a bien exhib´e un ouvert trivialisant pour tout b∈C∗et, par cons´equent,
l’exponentielle est un revˆetement de Csur C∗dont les fibres sont isomorphes `a Z.
Ce revˆetement n’est pas trivial, sinon il existerait une section globale de l’exponentielle, donc
une d´etermination continue du logarithme sur C∗.
2. Le raisonement est identique au pr´ec´edent. En choisissant une boule connexe o`u une d´etermination
du logarithme est possible, on peut se ramener `a une d´etermination de la racine carr´ee. Deux
telles d´eterminations ne peuvent diff´erer que par leur signe, voir la feuille de TD 1, exercice 2.
On prouve de mˆeme que z7→ p(z) = z2est un revˆetement (non-trivial) `a 2 feuillets de C∗sur
C∗. Ce n’est pas un revˆetement de Csur C. En effet, sinon il existerait un voisinage Ude 0 tel
que p−1(U) soit hom´eomorphe `a U×Favec Fdiscret. Mais pour tout point z6= 0 diff´erent de
0, F∼
=p−1({z}) est de cardinal 2. En revanche p−1({0}) = {0}est de cardinal 1, donc Fdoit
aussi ˆetre de cardinal ce qui est absurde !
3. Par hypoth`ese et le th´eor`eme d’inversion locale, P|C\P−1(F)est un hom´eomorphisme local. De
plus, ses fibres sont finies (de cardinal le degr´e de P, puisque il n’y a pas de racines multiples sur
l’ensemble C\P−1(F)). Enfin C\P−1(F) est le compl´ementaire d’un nombre fini de points dans
C, donc est connexe. Par cons´equent, les questions 5 et 7 de l’exercice 1 assure que P|C\P−1(F):
C\P−1(F)→C\Fest un revˆetement de degr´e deg(P).
4. L’ensemble Pnest le quotient de Cnpar l’action du groupe sym´etrique Σn(c’est `a dire le groupe
des permutations d’un ensemble `a n ´el´ements) donn´ee par σ.(z1, . . . , zn)=(zσ−1(1), . . . , zσ−1(n)) ;
qui est une action `a gauche. L’action de Σnsur Cnest libre car les zisont tous distincts pour
tout z= (z1, . . . , zn)∈Cn. L’action est trivialement propre puisque Σnest fini. Enfin, Cnest
localement compact car c’est un ouvert de Cn. Il suit que le quotient Cn→Cn/Σn∼
=Pnest un
revˆetement `a n! feuilles.
Exercice 3. (Groupes et revˆetements)
1. Soit Hun sous-groupe discret d’un groupe topologique connexe G. On suppose que Hest
distingu´e dans G. Montrer que Hest contenu dans le centre.
2. Soit Gun groupe topologique et G0la composante connexe de l’identit´e. D´eterminer les quotients
topologiques G/G0pour
3

–G=GL(n, R)
–G={f∈O3(R), f(Z× {(0,0)})⊂Z× {(0,0)}}
–G=O(q) o`u q(x, y, z) = x2+y2−z2.
3. Soit Hun sous-groupe discret de G. Montrer que la projection canonique G→G\Hest un
revˆetement.
4. Montrer qu’il existe un groupe simplement connexe Gqui est un revˆetement du tore S1×S1.
5. (Partiel 2009) Montrer que le tore n’est pas contractile.
Indication : on consid´erera l’inclusion i:R/Z→R2/Z2d´efinie par i([x]) = [x, 0] et la projection
p:R2/Z2→R/Zd´efinie par p([x, y]) = [x].
Solution 3. 1. Soit h∈H. L’application g7→ ghg−1est continue, `a valeur dans Hcar Hest
distingu´e. Comme Gconnexe, GhG−1est un connexe de Hqui est discret, donc un singleton.
Or pour g= 1, 1h1−1=h, donc ce singleton c’est {h}. Il suit que pour tout g∈G,ghg−1=h
et donc hest central. Conlusion : Hest inclus dans le centre de G.
2. Rappelons (voir la feuille de TD 1) que G0est distingu´e, en particulier G/G0est un groupe.
– Le d´eterminant det : GL(n, R)→R∗est continue et surjectif. Comme R∗a 2 composantes
connexes, GL(n, R) en a au moins 2 aussi. Pour montrer que GL(n, R) n’a que 2 composantes
connexes, il suffit de voir que GL(n, R)+={M, det(M)>0}est connexe. En effet, GL(n, R)\
GL(n, R)+est hom´eomorphe `a GL(n, R)+via la multiplication GL(n, R)+3H7→ M·H∈
GL(n, R)\GL(n, R)+donn´ee par toute matrice de d´eterminant n´egatif M. La connexit´e (par
arcs) de GL(n, R)+peut se d´eduire du fait que GL(n, R)+est engendr´e par les transvections et
les matrices diagonales (dont le d´eterminant est strictement positif). On peut ramener toutes
ces matrices `a l’identit´e par un chemin continu. D’o`u GL(n, R)/GL(n, R)+∼
=Z/2Z.
– Rappelons que les vecteurs colonnes d’une matrice orthogonale forment une base orthonorm´ee.
Il suit alors de f(Z× {(0,0)})⊂Z× {(0,0)}que si f∈G, alors f(1,0,0) = ±1. L’application
G→ {±1}donn´ee par f7→ f(1,0,0) est continue, surjective (c’est facile `a v´erifier). On a donc
au moins 2 composantes connexes. Soit G+={f∈G, f(1,0,0) = 1}; clairement id ∈G+.
Une matrice de G+s’´ecrit sous la forme d’un bloc f=1 0
0Ao`u A∈O2(R), et toute
matrice de cette forme est dans G+donc G+est hom´eomorphe `a O(2). Il suit que Gest
hom´eomorphe au produit Z/2Z×O(2) a 4 composantes connexes et G0∼
=SO(2). Finalement
G/G0∼
=Z/2Z×Z/2Z.
– Si M∈O(q), alors tMI2,1M=I2,1o`u I2,1est la matrice id 0
0−1. Il suit en prenant le
d´eterminant que pour tout g∈G, det(g) = ±1. On note SO(q) = O(q)∩SL3(R). Il est clair
que −id est dans O(q)\SO(q). Donc il y au moins 2 composantes connexes dans O(q). De plus,
comme SO(q)∼
=O(q)\SO(q) (encore par multiplication par une matrice de O(q)\SO(q)),
il suffit de d´eterminer les composantes connexes de SO(q). Les ´el´ements de SO(q) pr´eservent
l’hyperbolo¨ıde `a 2 nappes S={(x, y, z), q(x, y, z) = −1}par d´efinition. Notons que (0,0,1) ∈
S, donc pour tout g∈SO(q), q(g(0,0,1)) = −1 ce qui force que g(0,0,1) = (xg, yg, zg) a
une composante zgnon-nulle. L’application g7→ zgest continue puisque la composition d’une
application lin´eaire avec un vecteur est continue. On note SO(q)+={g∈SO(q), zg>0}. La
matrice bloc
−1 0 0
010
0 0 −1
est dans SO(q)\SO(q)+. On en d´eduit que SO(q) a au moins 2
composantes connexes ; de plus SO(q)∼
=SO(q)\SO(q)+. Montrons que SO(q)+est connexe
(par arcs). Par d´efinition, les rotations d’axe (0,0,1) sont dans SO(q)+. Soit g∈SO(q)+; on
note encore g(0,0,1) = (xg, yg, zg). Quitte `a composer gpar une rotation d’axe (0,0,1) peut
supposer que xg= 0. Il suit que z2
g−y2
g= 1 et donc il existe t0∈Rtel que zg= cosh(t0) et
yg= sinh(t0) (cosh et sinh sont le cosinus et le sinus hyperboliques). Par ailleurs quel que soit
4

t∈R, la matrice At:=
1 0 0
0 cosh(t) sinh(t)
0 sinh(t) cosh(t)
est dans SO(q)+, et de plus At·As=At+s. Il
vient, en composant gpar A−t0que l’on peut ram`ener g`a une matrice de SO(q)+satisfaisant
g(0,0,1) = (0,0,1) en multipliant gpar des rotations et ”rotations hyperboliques” c’est `a dire
des matrices de la forme At. Or les rotations peuvent ˆetre ramen´ees apr`es un chemin continu
de rotations `a l’identit´e et de mˆeme pour les matrices de la forme At(il suffit de consid´erer
l’application (u, At)7→ Aut). Donc il suffit de montrer que les matrices de SO(q)+satisfaisant
g(0,0,1) = (0,0,1) sont connexes. Or on v´erifie sans mal que ces matrices sont pr´ecis´ements les
roations d’axe (0,0,1), donc forment un espace hom´eomorphe `a SO(2) ; en particulier connexe.
Finalement on a montr´e qu’il y a 4 composantes connexes (hom´eomorphes entre elles) et que
O(q)0=SO(q)+. Enfin on a une suite exacte de groupes donn´ees par SO(q)→O(q)det
Z/2Z
qui est scind´ee (car le sous-ensemble {±id}est un sous-groupe de O(q)). On en d´eduit que
O(q)/O(q)0∼
=(Z/2Z)×(Z/2Z).
3. Par hypoth`ese, Hest un sous-groupe discret, donc l’unit´e est isol´ee dans H. D’o`u il existe Ueun
voisinage de l’identit´e edans Gtel que Ue∩H={e}. D’apr`es un th´eor`eme du cours, G→G/H
est un revˆetement.
4. On consid`ere l’application R2→R2/Z2∼
=S1×S1. C’est un revˆetement car Z2est un sous-groupe
discret de R2et on peut utiliser la question pr´ec´edente pour montrer que c’est un revˆetement (qui
n’est autre que le produit d’exponentielles bien-sˆur). De plus R2est contractile, donc simplement
connexe.
5. Soit i:R/Z→R2/Z2l’inclusion du tore. On note p:R2/Z2→R/Zl’application donn´ee
par p([x, y]) = [x]. On v´erifie que pet isont bien d´efinies et continues (en effet, l’application
R2→R/Zdonn´ee par (x, y)7→ [x] est continue et constante sur les orbites de Z2, donc d´efinit
l’application continue p; on proc`ede de mˆeme pour i). Enfin p◦i= id. Donc l’application p◦i
n’est pas homotope `a une application constante. Si le tore ´etait contractile, il existerait une
homotopie H: [0,1] ×R2/Z2→R2/Z2v´erifiant H(0,−) = id et H(1,−) est constante. Alors
l’application compos´ee K: [0,1] ×R/Z→R/Zd´efinie par K(t, [x]) = p(H(t, i[x])) est continue
(par composition d’applications continues) et v´erifie K(0,−) = id et K(1,−) est constante. Ceci
est absurde puisque le cercle R/Zn’est pas simplement connexe. Par cons´equent le tore ne l’est
pas non plus, a fortiori n’est pas contractile non-plus.
Exercice 4. (Bouteille de Klein) On consid`ere la relation d’´equivalence sur R2engendr´ee par (x, y)∼
(x+ 1, y) et (x, y)∼(−x, y + 1) et on note Kle quotient.
1. Montrer que Kest l’espace des orbites de l’op´eration sur R2d’un sous-groupe de son groupe
d’isom´etries.
2. Montrer que Kest compact et connexe et que la projection canonique est un revˆetement.
3. Construire un revˆetement `a deux feuillets : S1×S1→K
4. Construire un revˆetement `a Zfeuillets de Msur Ko`u Mest le ruban de M¨obius.
Solution 4. 1. On note t, la translation t(x, y)=(x+ 1, y) de vecteur horizontal et r, la sym´etrie-
gliss´ee r(x, y)=(−x, y + 1) donn´ee par la composition d’une sym´etrie d’axe vertical et d’une
translation verticale. Il est clair que r, t sont des isom´etries affines. On note G=ht, hile sous-
groupe des isom´etries engendr´e par r, t. On remarque que trt(x, y)=(−x, y + 1), d’o`u la relation
trt =r. De cette relation on d´eduit que tout ´el´ement de Gpeut s’´ecrire sous la forme rntm.
De plus, rntm(x, y) = ((−1)nx+ (1)nm, y +n), ce qui prouve facilement que l’´ecriture rntmest
unique. Par cons´equent, le groupe Gest le groupe G={rntm, n, m ∈Z}muni de la multiplication
rntm·rptq=rn+ptq+(−1)pm(comme on le v´erifie sans peine). Soit Kun compact ; alors il existe
un carr´e [−q, q]2qui contient K. On d´eduit de l’´ecriture rntm(x, y) = ((−1)nx+ (1)nm, y +n),
que si |n|ou |m|sont plus grand que 4q,rntm(K)∩K=∅. Par cons´equent, Gagit proprement
5
 6
7
8
6
7
8
1
/
8
100%