géométrie vectorielle

Picchione Serge 2014-2015
GÉOMÉTRIE
VECTORIELLE
3ème année
2.1 Vecteurs du plan et de l’espace 1
2.1.1 Introduction 1
2.1.2 Ensembles 2
\ et 3
\ 2
2.1.3 Composantes d’un vecteur 4
2.1.4 Opérations sur les vecteurs 6
2.1.5 Combinaison linéaire, colinéarité, coplanarité 10
2.1.6 Norme d’un vecteur 22
2.1.7 Composantes d’un vecteur du plan en fonction
de sa norme et de son angle directeur * 26
2.1.8 Ce qu’il faut absolument savoir 29
2.2 Produit scalaire, déterminant et produit
vectoriel 30
2.2.1 Le produit scalaire 30
2.2.2 Propriétés du produit scalaire 31
2.2.3 Angle entre deux vecteurs 33
2.2.4 Projection orthogonale 36
2.2.5 Le déterminant 40
2.2.6 Le produit vectoriel * 47
2.2.7 Ce qu’il faut absolument savoir 55

Picchione Serge 2014-2015
2.3 Droites et plans 56
2.3.1 Équations paramétriques des droites dans 2
\ 56
2.3.2 Équations cartésiennes des droites dans 2
\ 57
2.3.3 Passage : Équations paramétriques / cartésiennes
des droites dans 2
\ 58
2.3.4 Position relative de deux droites dans 2
\
et intersections 59
2.3.5 Angles entre deux droites dans 2
\ 60
2.3.6 Distance entre un point et une droite dans 2
\ 61
2.3.7 Équations paramétriques des droites dans 3
\ 66
2.3.8 Équations cartésiennes des droites dans 3
\ 68
2.3.9 Position relative de deux droites dans 3
\
et intersections 69
2.3.10 Angles entre deux droites dans 3
\ 70
2.3.11 Équations paramétriques des plans dans 3
\ 74
2.3.12 Équations cartésiennes des plans dans 3
\ 75
2.3.13 Passage : Équations paramétriques / cartésiennes
des plans dans 3
\ 77
2.3.14 Distance entre un point et un plan dans 3
\ 78
2.3.15 Angles entre deux plans dans 3
\ 79
2.3.16 Ce qu’il faut absolument savoir 85
2.4 Cercles et sphères * 86
2.5 Solutions des exercices 92

Picchione Serge 2014-2015
AVANT-PROPOS
• Ce document a été conçu pour l’enseignement des mathématiques dispensé au Collège de
Genève en troisième année, en géométrie vectorielle. Cela dit, il peut servir de support de cours
pour d’autres filières d’enseignement.
• Vous trouverez dans ce chapitre de la théorie (définitions, théorèmes, démonstrations, etc.)
et des exercices qui vous permettront progressivement de vous familiariser et de maîtriser les
diverses notations et concepts mathématiques. À la fin du chapitre se trouvent les solutions des
exercices, des activités et des Q.C.M. à l’exception de ceux faisant intervenir des démonstrations.
• Les exercices accompagnés d’un astérisque (*), sont des exercices supplémentaires de
développement destinés, par exemple, aux élèves ayant choisi l’option, niveau avancé (MA2).
• Pour mieux repérer les points importants de la théorie, les définitions sont dans un encadré
blanc et les théorèmes dans un encadré grisé.
• Pour vérifier votre niveau de compréhension à la fin de l’étude d’un sous chapitre, vous pouvez
vous référer aux sections : « Ce qu’il faut absolument savoir » et « Questionnaire à choix
multiples ».
• Vous pouvez télécharger ce document au format PDF à l’adresse suivante :
http://www.sismondi.ch/disciplines/mathematiques/espace-perso-profs/serge-picchione
• Pour finir, un grand merci aux collègues de divers établissements scolaires qui ont partagé
leurs cours : Nicolas Chabal, Yves Drevous, Bernard Gisin, Alain Klopfenstein, Maurizio
Lalicata, Bernard Lenggenhager, Romanita Nagy Gauxachs, Adrien Schleining et Serge Zoutter.
BON TRAVAIL !

Picchione Serge 2014-2015

________________________________________________________________________________
P.S. / 2014-2015 1 Géométrie vectorielle / 3 N-A
2.1 Vecteurs du plan et de l’espace
2.1.1 Introduction
Dans ce cours de Mathématiques, nous allons reprendre le concept de vecteur étudié en Physique.
Nous nous intéresserons à généraliser et à modéliser ce concept afin de l'utiliser dans l'étude de la
Géométrie.
Pour rappel, certaines grandeurs physiques peuvent être modélisées à l'aide d'un seul nombre.
Par exemple, la température, la masse, une distance, un angle d'inclinaison, etc.
Ces grandeurs sont appelées grandeurs scalaires.
D'autres grandeurs comme une force, une position,
une vitesse, un champ électrique ne peuvent pas être
modélisées qu'à l'aide d'un seul nombre. On a besoin
de connaître leur direction, leur sens et leur intensité
(un nombre).
Ces grandeurs sont alors appelées grandeurs vectorielles.
t
v vecteur position du"point" au temps t.=
J
G
Définitions
Un vecteur est un objet entièrement déterminé par la donnée d'une direction, d'un sens
et d'une intensité (un nombre).
On représente un vecteur par une flèche ce qui permet justement de décrire une direction (droite),
un sens (pointe) et une intensité (longueur de la flèche).
• Le point d’application du vecteur est le point A et l’extrémité est le point B.
On note vAB=
J
JJG
G
un vecteur et vAB=
J
JJG
G
son intensité (on dit aussi norme de v
G
).
• On appelle vecteur nul, noté 0
G
, le vecteur dont le point d'application et l’extrémité coïncident :
AA = 0
J
JJG
G
. Le vecteur nul 0
G
à une intensité nulle, sa direction est indéterminée.
• Le vecteur opposé de vAB=
J
JJG
G
est le vecteur dont l’origine
est B et l’extrémité A. Il est noté vBA AB−= =−
G
JJJGJJJG
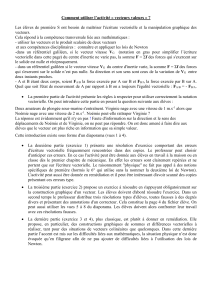
Deux vecteurs sont équivalents si et seulement si ils ont même direction, même sens
et même intensité (longueur).
Exemples
Les vecteurs
A
B
J
JJG
et CD
J
JJG
sont équivalents
(même norme, direction et sens).
Les vecteurs AB
J
JJG
et EF
J
JJG
ne sont pas
équivalents car ils n’ont pas la même norme.
Les vecteurs GH
J
JJG
et JI
J
JG
ne sont pas équivalents
car ils n’ont pas le même sens.
A
B
v
G
v
G
v
G
v−
G
A
B
O
1
v
J
G
2
v
J
JG
3
v
J
JG
•
•
•
A
B
C
D
E
F
G
H
I
J
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
1
/
114
100%