Méthodes de calcul et statistiques I Nombres complexes et

BGPC–LM100 Année 2007-2008
Méthodes de calcul et statistiques
Corrigé du contrôle continu du 29 mars 2008
I Nombres complexes et trigonométrie
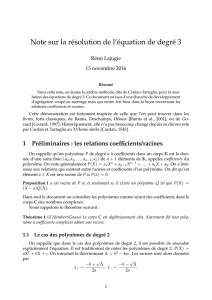
z0
z1
z2
z3
z4
x
y
Les 5 racines.
I.3 L’équation (1) s’écrit, en notant ρet θle module et l’argument de z:
ρ eiθ5=ρ5ei5θ= 1ei0⇒ρ5= 1 et 5θ= 0 [2π],
d’où ρ= 1 et θ=k2π/5où k∈ {0,1,2,3,4}. Soit les cinq racines :
z0= 1 , z1=ei2π/5, z2=ei4π/5, z3=ei6π/5, z3=ei8π/5.(3)
I.3 Le nombre 1 étant une des racines, on sait que l’on peut factoriser par z−1. Il suffit de développer le
polynôme de l’équation (2) :
(z−1) (z4+z3+z2+z+ 1) = z5©©
©
−z4©©
©
+z4−Z
Z
z3+@
@
z3©©
©
−z2©©
©
+z2HH
−zH
H
+z−1 = z5−1 = 0
I.4 Il suffit de développer et de regrouper les termes dépendants de φ:
(z2+φ z + 1)(z2−z/φ + 1) = z4+z2+ 1 + (z+z3)(φ−1/φ) = z4+z3+z2+z+ 1
si et seulement si φ−1/φ = 1, soit φ2−φ−1 = 0.
I.5 On résout l’équation du second degré en φ±= (1 ±√5)/2, dont seule la racine φ= (1 + √5)/2est
comprise entre 1 et 2.
II Vecteurs et matrices
A
D
C
B
x
y
z
Les 4 points.
II.2 On a : AB ≡−−→
AB =OB −OA = (2,2,2) −(1,1,1) = (1,1,1) ,
DC ≡−−→
DC =OC −OD = (1,0,1) −(0,1,1) = (1,−1,0) .
II.3 M·OA = (1 + 1/√2,1−1/√2,0) .
Comme il apparaîtra plus tard, Mest une isométrie de l’espace (matrice
orthogonale), de déterminant 1, laissant invariante la droite engendrée par le
vecteur i+j(c’est à dire telle que y=x,z= 0). C’est donc une rotation autour
de cet axe. On montre que l’angle de cette rotation est de π/2en constatant
que le vecteur k, perpendiculaire à l’axe, est amené dans le plan 0xy (3ècolonne de M).
II.4 Le calcul de det(M)de fait de façon la plus commode en développant par rapport à la dernière colonne :
det(M) = 1
√2
1
2
1
2
−1
√2
1
√2
+
1
2
1
2
−1
√2
1
√2
=1
√21
√2+1
√2= 1
II.5 Il s’ensuit que la matrice Mest inversible. On peut évaluer son inverse par la méthode de Gauss,
en commençant par multiplier par 2 les deux premières lignes et par η=√2la troisième, puis en
permutant les deuxième et troisième lignes (pour éviter un pivot nul) :
1 1 η|2 0 0
−1 1 0 |0 0 η
1 1 −η|0 2 0
`2←(`1+`2)/2
−−−−−−−→
`3←`3−`1
1 1 η|+2 0 0
0 1 η/2|+1 0 η/2
0 0 −2η|−2 2 0
`1←`1−`2
−−−−−→
`3←−`3/2η
1 0 η/2|+1 0 −η/2
0 1 η/2|+1 0 η/2
0 0 1 |1/η −1/η 0
`1←`1−η`3/2
−−−−−−→
`2←`2−η`3/2
1 0 0 |+1/2 1/2−η/2
0 1 0 |+1/2 2/2η/2
0 0 1 |1/η −1/η 0
1

BGPC–LM100 Année 2007-2008
et en utilisant η/2 = 1/√2, il vient :
M−1=
1
2
1
2
1
√2
1
2
1
2−1
√2
1
√2−1
√20
,(4)
et on constate que M−1=t
M, comme on devait s’y attendre en constatant que Mest une matrice
orthogonale, c’est à dire que ses vecteurs colonnes sont de norme 1 et perpendiculaires deux à deux.
II.6 L’équation M·X=Xs’écrit encore (M−11)·X= 0, soit :
−1
2x+1
2y+1
√2z= 0 1
2x−1
2y−1
√2z= 0 −1
√2x+1
√2y−1z= 0 (5)
II.7 Le système obtenu est visiblement homogène1. Par contre le fait que Msoit inversible n’assure au-
cunement le fait que M−11 le soit (ou non). En revanche, on constate immédiatement que les deux
premières équations sont identiques, ce qui indique que le système n’est pas régulier (det(M−11) = 0),
et il y a donc une infinité de solutions.
II.8 La résolution de ce système peut être faite par une élimination fondée sur la méthode de Gauss. Mais
ici on voit que `1+`3/√2donne z= 0 ; en reportant alors dans `1, il s’ensuit que x=y, d’où les
solutions :
X= (x, x, 0) pour x∈IR .
III Fonctions et développements limités
III.1 On a : f(x) = Pn
p=0
f(p)(x0)
p!(x−x0)p+ (x−x0)n(x−x0), où (x−x0)→0pour (x−x0)→0.
III.2 On calcule successivement : f0(x) = x/√x2+ 5 et f00(x) = 5/(x2+ 5)2/2. Donc f(2) = 3,f0(2) = 2/3
et f00(x) = 5/27.
D’où le DL2:f(x)≈3 + 2
3(x−2) + 5
2×27 (x−2)2.
III.3 On constate immédiatement que le numérateur et le dénominateur de gtendent vers 0 lorsque x→2,
ce qui donne une forme indéterminée. On peut alors utiliser le DL de fà l’ordre 1 pour écrire :
g(x)≈4−x2
3−(3 + 2
3(x−2)) =−(x+ 2)(x−2)
−2
3(x−2)) =3(x+ 2)
2−−−→
x→26.(6)
III.4 La fonction fest définie sur IR. Elle est paire. Compte tenu des dérivées obtenues ci-dessus, on constate
que f0(x)est du signe de x, et que f00(x)est strictement positive ; fest donc convexe et n’a pas de point
d’inflexion.
0
1
2
3
4
5
6
7
8
-8 -6 -4 -2 0 2 4 6 8
Graphe de la fonction f.
Ses limites en ±∞ sont visiblement +∞. De plus,
on peut écrire pour xgrand : f(x) = xp1+5/x2≈
x(1 + 1/2×5/x2), ce qui montre que f(x)−x≈
5/2x→0+lorsque x→+∞. On en déduit que le
graphe de fpossède deux asymptotes obliques de
pente ±1en ±∞. D’où le tableau de variation et le
graphe (c’est une hyperbole) :
x−∞ 0 +∞
f0(x)−1−0 + +1
f(x) +∞ & √5%+∞
1. Sans discuter a priori la nullité éventuelle de X(comme on lit dans beaucoup de copies), ce qui est absurde, puisque
cela revient à dire : «si je suppose que Xest nul, alors je trouve comme solution Xnul.
2. Il est absurde de développer ce polynôme, puisque il n’a d’intérêt qu’au voisinage de x= 2, et aucun sens autour
de x= 0.
2
1
/
2
100%