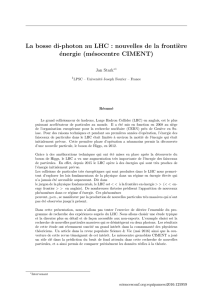
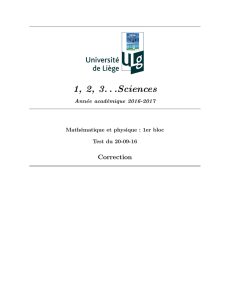
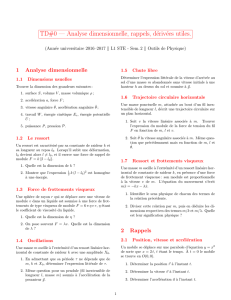
Portails L1 Physique-Chimie et Mathématiques-Physique Année 2023-2024 UFR Sciences Fondamentales et Appliquées (SFA) Travaux pratiques de Mécanique du point Responsable du cours : Prof. David A. Bonhommeau Email : [email protected] Bureau : 01S33, bâtiment Maupertuis 1 Organisation des travaux pratiques Le présent fascicule contient les trois sujets de travaux pratiques de mécanique du point disponibles, à savoir : • TP 1 : Oscillation d’un pendule simple. • TP 2 : Mouvement d’un mobile autoporteur. • TP 3 : Mouvement de chute d’une balle. A la fin de chaque TP, un modèle de compte-rendu de TP est fourni que les étudiants devront découper et remettre pour évaluation. Chaque étudiant interviendra seulement sur 2 des 3 TPs, le choix étant à la discrétion du responsable de l’enseignement, mais chaque étudiant devra impérativement connaı̂tre la théorie associée aux 3 TPs. Une séance de TD préparatoire permettra aux étudiants de poser des questions sur les aspects théoriques non compris. La note de TP représentera 20% de la note totale de mécanique du point. Elle sera par ailleurs la somme de 3 notes : • Une note d’interrogation écrite (6 pts) pour évaluer la compréhension de la théorie associée aux TPs. Cette interrogation sera probablement réalisée lors de la dernière séance de TD. • La note du premier compte-rendu de TP (7 pts). • La note du second compte-rendu de TP (7 pts). Les compte-rendus de TP devront systématiquement être rendus en fin de séance. Les étudiants sont donc fortement encouragés à lire l’intégralité de leur TP à l’avance. Le contenu et l’organisation des TPs ayant fortement changés par rapport à ceux des années précédentes, aucune note de TP ne sera reportée vers l’exercice 2023-2024. 2 TP 1 : Oscillation d’un pendule simple 1.1 Objectif du TP L’objectif de ce TP est de mesurer expérimentalement les périodes T des oscillations d’un pendule simple et de les comparer aux périodes théoriques T0 . La modification de paramètres de l’expérience (angle initial, longueur et masse du pendule) permettra de déterminer les grandeurs physiques qui agissent sur la valeur de la période, de comparer ces observations avec les prédictions théoriques, et de discuter l’origine des éventuelles différences entre théorie et expérience. 1.2 Etude théorique préliminiaire Soit un pendule simple de masse m assimilé à un point matériel M et attaché à un support rigide en un point O par l’intermédiaire d’un fil inextensible de longueur L (voir figure 1.1). Figure 1.1: Schéma du pendule simple à étudier. 1.2.1 Equation différentielle du pendule simple D’après le principe fondamental de la dynamique (PFD) m⃗a = X F⃗ext = T⃗ + P⃗ (1.1) où la tension T⃗ du fil et le poids P⃗ du pendule sont les seules forces à prendre en compte si les frottements de l’air sont négligés. Projetons le PFD dans la base polaire (⃗er , ⃗eθ ), Projection sur ⃗er : mar = −T + mg cos θ (1.2a) Projection sur ⃗eθ : maθ = −mg sin θ (1.2b) 3 où g est l’accélération de la pesanteur (g ≈ 9, 81 m s−2 ). Or, en coordonnées polaires, on peut facilement démontrer que la position, la vitesse et l’accélération du pendule précédent sont données par −−→ OM = L⃗er ⃗a = Lθ̈⃗eθ − Lθ̇2⃗er ⃗v = Lθ̇⃗eθ où la composante radiale de l’accélération est ar = −Lθ̇2 et sa composante orthoradiale est aθ = Lθ̈. D’après l’équation 1.2a, −mLθ̇2 = −T + mg cos θ ⇒ Lθ̇2 = T − g cos θ. m Cette relation permettrait d’évaluer la tension T à partir de la connaissance de θ(t) et θ̇(t), donc de la position et de la vitesse du pendule. D’après l’équation 1.2b, g mLθ̈ = −mg sin θ ⇒ θ̈ + sin θ = 0. L Si on pose ω02 = Lg alors on obtient θ̈ + ω02 sin θ = 0. Dans la limite des petites oscillations, sin θ ≈ θ et on trouve finalement θ̈ + ω02 θ = 0 (1.3) Il s’agit de l’équation d’un oscillateur harmonique à 1 dimension et ω0 est la pulsation propre de l’oscillateur. Cette équation différentielle admet deux solutions évidentes : θA (t) = A exp(iω0 t) θB (t) = B exp(−iω0 t) avec A et B des constantes complexes (A, B ∈ C). On rappelle que le nombre complexe i est défini par i2 = −1. Une solution générale de l’équation (1.3) peut s’écrire comme une combinaison linéaire des solutions θA (t) et θB (t) θ(t) = A exp(iω0 t) + B exp(−iω0 t) OU θ(t) = C cos(ω0 t) + D sin(ω0 t) avec A = C−iD et B = C+iD (C, D ∈ C). Les valeurs de A, B, C et D dépendent alors des conditions initiales 2 2 du problème. Par exemple, si le pendule est lâché d’un angle θ0 = π2 (direction horizontale) au temps t = 0 alors on trouve π θ(t) = cos(ω0 t). (1.4) 2 Dans cet exemple, l’amplitude maximale des oscillations est θm = π2 et on peut donc écrire θ(t) = θm cos(ω0 t) . (1.5) Si on néglige les frottements de l’air alors le mouvement du pendule ne sera pas amorti et il oscillera avec une période T0 entre sa valeur maximale θmax = +θm , obtenue pour les instants t = nT0 (n ∈ N), et minimale θmin = −θm , obtenue pour les instants t = n + 21 T0 (n ∈ N). 1.2.2 Période du pendule simple De manière générale, la période T d’un signal est reliée à sa fréquence ν et à sa pulsation ω par T = 1 2π = . ν ω (1.6) Dans le cas particulier d’un pendule simple de pulsation propre ω0 = 2π T0 = = 2π ω0 4 s L . g pg L on introduit la période (1.7) L’incertitude sur T0 peut être obtenue par dérivation usuelle, dérivation logarithmique ou en utilisant une méthode de calcul ISO basée sur le théorème de Pythagore. Par dérivation logarithmique, s 1 L 1 L T0 = 2π ⇒ ln T0 = ln(2π) + ln = ln(2π) + (ln L − ln g) g 2 g 2 dT0 1 dL dg ⇒ = − T0 2 L g 1 ∆L ∆g ∆T0 = + ⇒ T0 2 L g 1.3 Expériences à réaliser 1.3.1 Matériel utilisé • Un pendule composé d’un fil dont une extrémité est attachée à une barre horizontale. L’autre extrémité est attachée à une courte tige sur laquelle on peut placer des masses. La longueur du fil est réglable afin de mettre la masse à une hauteur choisie. • Une balance. • Un chronomètre. • Règles graduées ou mètres ruban. • Une caméra qui permettra de caractériser le mouvement du pendule. 1.3.2 Position du problème Ce TP s’attachera à évaluer l’influence d’une variation des différentes caractéristiques du pendule à savoir • l’angle θ0 d’où il est lâché, • sa masse m, • sa longueur L, afin de vérifier si les approximations formulées dans l’étude théorique préliminaire sont justifiées. 1.3.3 Mesures de la période du pendule Comme la période du pendule est assez courte il est fortement recommandé de moyenner cette valeur sur plusieurs périodes (une dizaine idéalement), ce qui permettra notamment de limiter l’effet de l’incertitude liée à la prise de mesure au chronomètre. Manipulation 1 - Premiers pas : Pour une masse m et une longueur L ≥ 60 cm données, mesurer 4 fois la période d’oscillation T pour une déviation initiale de 20 cm sur la règle horizontale. En déduire la mesure de la période T ainsi que l’incertitude associée ∆T . Reporter ces mesures et leurs incertitudes dans le compte-rendu. Comparer au résultat théorique attendu, c’est-à-dire T0 ± ∆T0 , et conclure. Manipulation 2 - Etude de l’influence de l’angle initial θ0 : Pour une masse m et une longueur L ≥ 60 cm données, mesurer la période d’oscillation T pour les 5 déviations initiales suivantes : 10 cm, 20 cm, 30 cm, 40 cm et 50 cm. Reporter ces mesures et leurs incertitudes dans le compte-rendu. Comparer aux résultats théoriques attendus et conclure. Manipulation 3 - Etude de l’influence de la masse m : Pour un angle choisi judicieusement et une longueur L ≥ 60 cm donnée, mesurer les périodes d’oscillations T correspondant à 3 valeurs de masses différentes. Reporter ces mesures et leurs incertitudes dans le compterendu. Comparer aux résultats théoriques attendus et conclure. 5 Manipulation 4 - Etude de l’influence de la longueur L du pendule : Mesurer désormais la période d’oscillation T pour 5 valeurs différentes de L comprises entre 20 cm et la longueur maximale possible. Prendre pour ces mesures une masse m = 325 g et un angle θ0 choisi judicieusement. Reporter ces mesures et leurs incertitudes dans le compte-rendu. Comparer aux résultats théoriques attendus et conclure. Attention : Dans tous les cas indiquer précisément dans les tableaux les masses, longueurs, ou déviations mesurées et non celles supposées dans le texte du TP. Par exemple, si pour la mesure avec une déviation de 30 cm (cf manipulation 2) votre déviation est de 30,3 cm alors indiquer 30,3 cm dans le tableau, si la masse mesurée n’est pas de 325 g (manipulation 4) mais de 327 g alors indiquer 327 g dans le tableau. Exploitation des résultats : 1. Générer un fichier texte à deux colonnes contenant les longueurs L (m) en colonne 1 et le carré des périodes mesurées T 2 (s2 ), en colonne 2. Appeler ce fichier T2 input.dat. Suivre alors les instructions suivantes pour tracer la fonction T 2 = f (L). (a) Ouvrir une fenêtre terminal (Ctrl + Alt + T) et créer un répertoire de travail nommé L1S1-Pendule NOM1 NOM2 (NOM1 et NOM2 sont les noms des 2 membres du binôme) sur le bureau de l’ordinateur. (b) Rentrer dans ce répertoire via la fenêtre terminal et y déplacer le fichier T2 gnuplot.dat (présent sur le PC ou fourni par l’enseignant). (c) Taper gnuplot pour entrer dans le logiciel gnuplot puis taper load ‘T2 gnuplot.dat’. Si vous avez suivi scrupuleusement les instructions précédentes, une figure au format png devrait avoir été générée automatiquement avec le nom T2 en fonction de L.png. 2. Quelle devrait être la valeur du coefficient directeur de cette droite ? Le vérifier graphiquement et par régression linéaire (fonction utilisée : T 2 = aL + b avec a et b des paramètres réels ajustables) et conclure. Pour effectuer la régression linéaire, récupérer le fichier T2-regression gnuplot.dat (présent sur le PC ou fourni par l’enseignant), retourner dans gnuplot, et taper load ‘T2-regression gnuplot.dat’. Le résultat de la régression linéaire doit s’afficher. 1.3.4 Conservation de l’énergie Enregistrer la trajectoire, c’est-à-dire les coordonnées x(ti ) et y(ti ), du pendule sur une dizaine d’oscillations à l’aide d’une caméra et du logiciel Tracker présenté en annexe. Ne pas oublier de préciser la masse du pendule et la longueur du fil utilisés. 1. Générer un fichier texte à trois colonnes contenant le temps ti en colonne 1, les coordonnées x(ti ) en colonne 2 et les coordonnées y(ti ) en colonne 3. Appeler ce fichier Coordonnees xy.dat et placer le dans votre répertoire de travail. 2. Expliquer comment il est possible de calculer les vitesses (vx (ti ) et vy (ti )) et les accélérations (ax (ti ) et ay (ti )) du pendule à partir de vos données. Les calculer en lançant l’exécutable pendule-dynamique.exe. Tracer les vitesses et accelerations sur des figures séparées avec le logiciel gnuplot en utilisant les commandes load ‘Vitesses gnuplot.dat’ et load ‘Accelerations gnuplot.dat’. 3. L’exécutable pendule-dynamique.exe calcule aussi les énergies cinétique, potentielle et mécanique du pendule au cours du temps. Donner les expressions théoriques de ces trois énergies. Récupérer le fichier Energies gnuplot.dat (présent sur le PC ou fourni par l’enseignant). Tracer les trois énergies sur un même graphique avec le logiciel gnuplot en utilisant la commande load ‘Energies gnuplot.dat’. L’énergie mécanique est-elle conservée ? Commenter. 6 Compte-rendu du TP 1 (à rendre en fin de séance) NOM et Prénom 1 : NOM et Prénom 2 : Note (/7) : Manipulation 1 - Premiers pas : m = Mesures T (s) , déviation = ∆T (s) , θ0 = T0 (s) ,L= ∆T0 (s) 1 2 3 4 Commentaires (incertitudes et comparaison à la théorie) : Manipulation 2 - Influence de θ0 : m = Déviation (cm) θ0 (deg) ,L= T (s) ∆T (s) T0 (s) d1 = d2 = d3 = d4 = d5 = Commentaires (incertitudes et comparaison à la théorie) : Manipulation 3 - Influence de m : déviation = Masse (g) T (s) , θ0 = ∆T (s) m1 = m2 = m3 = 7 ,L= T0 (s) ∆T0 (s) ∆T0 (s) Commentaires (incertitudes et comparaison à la théorie) : Manipulation 4 - Influence de L : m = L (cm) T (s) , déviation = ∆T (s) , θ0 = T0 (s) ∆T0 (s) L1 = L2 = L3 = L4 = L5 = Commentaires (incertitudes et comparaison à la théorie) : Exploitation des résultats Coefficient directeur de T 2 = f (L) par lecture graphique : a1 = Coefficient directeur de T 2 = f (L) par régression linéaire : a2 = Commentaires : Conservation de l’énergie Expression de vx (ti ) : Expression de ax (ti ) : Expression de l’énergie potentielle, Ep : Expression de l’énergie cinétique, Ec : Expression de l’énergie mécanique, Em : Commentaires : (Joindre les figures utiles en annexe du compte-rendu) 8 TP 2 : Mouvement d’un mobile autoporteur 2.1 Objectif du TP L’objectif de ce TP est d’étudier le mouvement d’un mobile autoporteur (mouvement sans frottement) sur un plan incliné en fonction de la valeur de l’angle et de la vitesse initiale du mobile. Les trajectoires obtenues expérimentalement seront soigneusement comparées avec celles prédites par la théorie ce qui permettra de discuter la validité des approximations formulées. La conservation de l’énergie mécanique du mobile sera également étudiée et les écarts au comportement idéal discutés. 2.2 Etude théorique préliminaire Considérons un mobile autoporteur qui se déplace sans frottement sur un plan incliné faisant un angle α avec l’horizontale et auquel est attaché un repère cartésien R(O, ⃗ex , ⃗ey , ⃗ez ) (voir figure 2.1a). La vitesse initiale du mobile, qu’on notera ⃗v0 , fait un angle γ avec la direction de ⃗ex . Figure 2.1: Mouvement du mobile autoporteur sur le plan incliné (a) et coupe annotée de l’expérience dans le plan défini par les vecteurs ⃗ey et ⃗ez (b). D’après le principe fondamental de la dynamique (PFD) m⃗a = X ⃗n F⃗ext = P⃗ + R (2.1) ⃗ n sont les seules forces à prendre en compte car tous les où le poids P⃗ et la réaction normale du plan incliné R frottements sont négligés dans le cas de l’étude du mouvement d’un mobile autoporteur. Commençons par projeter le PFD sur ⃗ez , on obtient d’après la figure 2.1b : maz (t) = −mg cos α + Rn 9 où g est l’accélération de la pesanteur (g ≈ 9, 81 m s−2 ). Or, le mouvement du mobile autoporteur est circonscrit au plan (Oxy) donc az (t) = 0 et Rn = mg cos α . (2.2) La composante selon z du poids compense donc exactement la réaction normale du plan incliné. Projetons maintenant le PFD sur ⃗ex et ⃗ey : max (t) = 0 ⇒ ax (t) = 0 Projection sur ⃗ey : may (t) = mg cos π2 + α = −mg sin α ⇒ ay (t) = −g sin α . Projection sur ⃗ex : (2.3a) (2.3b) Sachant que la vitesse initiale du mobile est ⃗v0 = v0 cos γ ⃗ex + v0 sin γ ⃗ey , l’intégration des expressions de ax (t) et ay (t) conduit aisément aux expressions des vitesses vx (t) et vy (t) (attention : toutes les étapes de calcul doivent figurer dans les copies d’examen) : vy (t) = −g(sin α)t + v0 sin γ . vx (t) = v0 cos γ (2.4) Il est important de remarquer que ce n’est pas parce qu’aucune des forces s’appliquant sur le mobile n’a de composante selon ⃗ex que ce dernier ne peut pas avoir de vitesse selon cette direction. En effet, le mouvement d’un système dépend non seulement des forces extérieures auxquelles il est soumis mais aussi des conditions initiales et le mobile autoporteur a une composante de vitesse non nulle selon ⃗ex à t = 0. Sachant que le point de départ du mobile est choisi à l’origine O du repère x(t = 0) = y(t = 0) = 0, l’intégration des expressions de vx (t) et vy (t) conduit aisément aux expressions des coordonnées x(t) et y(t) : 1 y(t) = − g(sin α)t2 + v0 (sin γ)t . 2 x(t) = v0 (cos γ)t (2.5) La trajectoire du mobile s’obtient en exprimant le temps t en fonction de x à partir de l’expression de x(t) et en injectant cette relation dans l’expression de y(t). On obtient alors x t= v0 cos γ 1 ⇒ y(t) = − g sin α 2 ⇒ y(x) = − x v0 cos γ 2 + v0 sin γ x v0 cos γ g sin α x2 + (tan γ)x . 2v02 (cos γ)2 (2.6) Il s’agit de l’équation d’une parabole pour la variable x. Le mobile autoporteur a donc une trajectoire parabolique. 2.3 Expériences à réaliser 2.3.1 Matériel utilisé • Un mobile autoporteur relié par des fils électriques au boı̂tier d’alimentation. • Un plan inclinable à l’aide de cales métalliques. • Une caméra placée au dessus du plan qui permet d’enregistrer le mouvement du mobile. La vidéo enregistrée sera analysée par le logiciel Tracker qui permet d’extraire les temps et les positions du mobile sur chaque image. La procédure d’utilisation de ce logiciel est présentée en annexe. Elle doit être suivie scrupuleusement afin d’obtenir des données exploitables. 10 2.3.2 Réalisation des enregistrements Il faut dans un premier temps régler l’expérience pour que la totalité du plan, dans lequel le mobile se déplace, soit visible. Au début de l’enregistrement de la vidéo, une règle sera placée sur le plan incliné qui servira d’étalon permettant au logiciel Tracker de convertir les données de positions exprimées en pixels sur l’image en positions exprimées en mètres, par rapport à un repère qu’il faudra définir. Repère : Le repère défini dans Tracker est composé de deux axes parallèles aux cotés de l’image. Il faut donc bien faire attention à ce que l’axe vertical soit parallèle à l’un des côtés de l’image. Inclinaison du plan : Le plan sera incliné à l’aide d’un jeu de cales métalliques, sans toucher aux réglages des vis assurant l’horizontalité. Bien que la mesure de l’angle se fera aussi à l’aide des données expérimentales, il est important d’en faire une mesure directe sur le montage expérimental. Cette mesure sera comparée ultérieurement à celle obtenue lors de l’analyse des données. 2.3.3 Exploitation des résultats 1. Mesurer précisément le sinus de l’angle d’inclinaison et peser le mobile autoporteur. 2. Créer un répertoire de travail nommé Mobile NOM1 NOM2 (NOM1 et NOM2 sont les noms des 2 membres du binôme) sur le bureau de l’ordinateur. 3. Générer un fichier texte à trois colonnes contenant le temps ti en colonne 1, les coordonnées x(ti ) en colonne 2 et les coordonnées y(ti ) en colonne 3 en prenant soin d’éliminer les points qui précèdent le début du mouvement du mobile ainsi que ceux en fin de trajectoire lorsque le mobile rebondit sur le côté du plan incliné. Appeler ce fichier Coordonnees xy.dat et placer le dans votre répertoire de travail. 4. Expliquer comment il est possible de calculer les vitesses (vx (ti ) et vy (ti )) et les accélérations (ax (ti ) et ay (ti )) du mobile à partir de vos données. 5. Ouvrir une fenêtre terminal (Ctrl + Alt + T), allez dans votre répertoire de travail et lancer l’exécutable mobile-dynamique.exe (présent sur le PC ou fourni par l’enseignant) pour calculer les vitesses et les accélérations du mobile. Ces grandeurs seront tracées sur 2 figures séparées à l’aide du logiciel gnuplot : (a) Récupérer les fichiers Vitesses gnuplot.dat et Accelerations gnuplot.dat (présents sur le PC ou fournis par l’enseignant). (b) Dans votre répertoire de travail taper gnuplot puis les commandes load ‘Vitesses gnuplot.dat’ pour tracer les deux composantes des vitesses et load ‘Accelerations gnuplot.dat’ pour tracer les deux composantes des accélérations. Deux figures au format png devraient avoir été créées avec les vitesses et les accélérations du mobile. 6. Déduire des courbe précédentes les valeurs de la vitesse v0 et des angles α et γ, par simple lecture graphique (expliquer votre raisonnement). La valeur de l’angle α est-elle compatible avec la mesure réalisée à la question 1 ? 7. Récupérer le fichiers Trajectoire gnuplot.dat (présent sur le PC ou fourni par l’enseignant). Dans le logiciel gnuplot, taper load ‘Trajectoire gnuplot.dat’ pour créer une figure au format png de la trajectoire du mobile autoporteur. Une régression non-linéaire de la trajectoire, dont les paramètres sont affichés à l’écran et sont sauvegardés dans un fichier nommé fit.log, est aussi automatiquement réalisée en utilisant la fonction y = ax2 + bx + c avec a, b et c des paramètres réels ajustables. Discuter l’accord obtenu entre les points mesurés et la trajectoire théorique ajustée. 8. Connaissant la valeur de sin α, calculer la hauteur h du mobile par rapport à l’origine du repère (voir figure 2.2). On choisira le premier point de l’enregistrement comme origine O de l’axe (Oy). Rajouter une colonne 4 au fichier Coordonnees xy.dat pour y faire figurer les hauteurs h. 11 Figure 2.2: Définition de la hauteur h. 9. Lancer l’exécutable mobile dynamique.exe pour calculer les énergies cinétique, potentielle, et mécanique du mobile. Donner les expressions théoriques de ces trois énergies. Récupérer le fichier Energies gnuplot.dat (présent sur le PC ou fourni par l’enseignant). Tracer les trois énergies sur un même graphique avec le logiciel gnuplot en utilisant la commande load ‘Energies gnuplot.dat’. L’énergie mécanique est-elle conservée ? Commenter. 12 Compte-rendu du TP 2 (à rendre en fin de séance) NOM et Prénom 1 : NOM et Prénom 2 : Note (/7) : Tableau de mesures du TP t (s) x (m) y (m) vx (m s−1 ) vy (m s−1 ) t1 = t2 = t3 = t4 = t5 = t6 = t7 = t8 = t9 = t10 = t11 = t12 = t13 = t14 = t15 = t16 = t17 = t18 = t19 = t20 = 13 h (m) Ep (J) Ec (J) Em (J) Exploitation des résultats Calcul des vitesses et des accélérations Expression de vx (ti ) : Expression de ax (ti ) : Valeurs de v0 , α et γ : Présentation du raisonnement : Valeurs des grandeurs demandées : v0 = Commentaire sur la valeur de α : ,γ= Trajectoire du mobile autoporteur : Paramètres de l’ajustement non linéaire : a = Commentaires : ,α= ,b= ,c= Conservation de l’énergie Expression de l’énergie potentielle, Ep : Expression de l’énergie cinétique, Ec : Expression de l’énergie mécanique, Em : Commentaires : (Joindre les figures utiles en annexe du compte-rendu) 14 TP 3 : Mouvement de chute d’une balle 3.1 Objectif du TP L’objectif de ce TP est d’étudier le mouvement de chute libre de balles, systèmes supposés à symétrie sphérique, et d’évaluer les conditions sous lesquelles les frottements de l’air ne sont plus négligeables, notamment en étudiant la conservation de l’énergie mécanique de ces systèmes. 3.2 Etude théorique préliminaire Soit R(O, ⃗ex , ⃗ey ) un repère orthonormé dans lequel l’origine O représente la position initiale d’une balle de masse m et ⃗ex le vecteur unitaire vertical descendant. On supposera que la vitesse initiale des balles est nulle (vx (0) = 0). En toute rigueur, une balle qui chute selon ⃗ex est soumise à son poids P⃗ , à sa poussée d’Archimède P⃗a et aux forces de frottement fluide f⃗ qui s’exercent à sa surface. Le principe fondamental de la dynamique (PFD) s’écrit alors m⃗a = P⃗ + P⃗a + f⃗. (3.1) En pratique, comme la poussée d’Archimède qui s’exerce sur une balle de volume V a une norme ||P⃗a || = ρair V g ≪ ||P⃗ ||, on la négligera et le PFD devient donc m⃗a = P⃗ + f⃗ . (3.2) Plusieurs cas de figure sont alors à considérer : 1. Chute libre de la balle si les frottements sont négligeables. 2. Chute de la balle avec frottements fluides linéaires si f⃗ = −α⃗v avec α ∈ R+ . 3. Chute de la balle avec frottements fluides quadratiques si f⃗ = −γv 2⃗ex avec ⃗v = v⃗ex et γ ∈ R+ . Notons que les frottements fluides linéaires sont obtenus pour des systèmes à faibles vitesses et les frottements quadratiques pour des systèmes plus rapides. 3.2.1 Chute libre d’une balle Comme les frottements de l’air sont négligés (f⃗ = ⃗0), le PFD conduit à m⃗a = m⃗g ⇒ ⃗a = ⃗g (3.3) où g est l’accélération de la pesanteur (g ≈ 9, 81 m s−2 ). Dans le cas simple d’un mouvement de chute libre selon la direction (Ox) l’équation précédente devient ax (t) = g . Sachant que la vitesse initiale de la balle est nulle et que l’origine du repère d’espace est fixé au point de départ de la balle, l’intégration de ax (t) permet de trouver aisément l’expression de vx (t), et celle de vx (t) permet de déterminer l’équation horaire x(t) du mouvement de la balle (attention : toutes les étapes de calcul doivent figurer dans les copies d’examen). On obtient alors vx (t) = gt x(t) = 15 1 2 gt . 2 (3.4) 3.2.2 Chute d’une balle avec frottements fluides linéaires Si f⃗ = −α⃗v alors le PFD conduit à d⃗v = m⃗g − α⃗v dt d⃗v α ⇒ + ⃗v = ⃗g . dt m Dans le cas d’un mouvement unidimensionnel selon ⃗ex cette relation devient m⃗a = m⃗g − α⃗v ⇒ m dvx α + vx = g dt m (3.5) Une solution générale de cette équation peut être déterminée comme la somme d’une solution de l’équation homogène vx,h (t) et d’une solution particulière vx,p (t) : vx (t) = vx,h (t) + vx,p (t). (3.6) La solution homogène vx,h (t) vérifie l’équation différentielle dvx,h α + vx,h = 0 ⇒ dt m dvx,h α = − dt vx,h m Z Z α dt ⇒ d ln(vx,h ) = − m α ⇒ vx,h (t) = A exp − t m avec A ∈ R. La solution particulière vx,p (t) peut être choisie comme la solution de l’équation différentielle (3.5) qui annule la dérivée de la vitesse (vitesse extrémale ou simplement constante), c’est-à-dire α mg vx,p (t) = g ⇒ vx,p (t) = . m α Une solution générale de (3.5) est donc α mg vx (t) = A exp − t + . m α mg Comme vx (t = 0) = 0 par hypothèse, on trouve que A + mg α = 0 ⇒ A = − α ce qui conduit à l’expression de la vitesse vx (t) pour une chute libre avec frottements fluides linéaires : gt vx (t) = v∞ 1 − exp − (3.7) v∞ où on a posé v∞ = mg . α L’équation horaire x(t) s’obtient alors par intégration de vx (t) entre les temps t′ = 0 et t′ = t Z t Z t dx ⇒ dx(t) = vx (t)dt ⇒ vx (t) = dx(t′ ) = vx (t′ )dt′ dt 0 0 Z t gt′ dt′ ⇒ x(t) − x(0) = v∞ 1 − exp − v∞ 0 Z t Z t gt′ ′ ⇒ x(t) = v∞ dt − exp − dt′ car x(0) = 0 par hypothèse v∞ 0 0 v∞ gt ⇒ x(t) = v∞ t + exp − −1 g v∞ (3.8) On peut vérifier que ce résultat est effectivement homogène à une longueur. Bien que l’accélération ax (t) soit moins utile que vx (t) ou x(t) pour étudier le mouvement de chute de la balle, on peut la déterminer en dérivant vx (t). On obtient alors : gt . (3.9) ax (t) = g exp − v∞ 16 3.2.3 Chute d’une balle avec frottements fluides quadratiques Si f⃗ = −γv 2⃗ex alors le PFD conduit à m⃗a = m⃗g − γv 2⃗ex d⃗v + γv 2⃗ex = m⃗g dt d⃗v γ + v 2⃗ex = ⃗g . dt m ⇒ m ⇒ Dans le cas d’un mouvement unidimensionnel selon ⃗ex cette relation devient γ dvx + v 2 = g. dt m Comme v 2 = vx2 + vy2 + vz2 mais que la vitesse de la balle n’a de composante non nulle que selon (Ox) car la vitesse initiale est nulle par hypothèse, on obtient finalement γ dvx + vx2 = g . dt m (3.10) 2 Posons v∞ = mg γ (on anticipe ici l’expression de la vitesse pour un temps infini, cette hypothèse sera confirmée en fin de calcul), l’équation (3.10) peut s’écrire " 2 # dvx vx =g 1− . dt v∞ x qui est un nombre sans dimension. On obtient Effectuons le changement de variable Vx = vv∞ v∞ dVx = g(1 − Vx2 ) ⇒ dt dVx g = dt 1 − Vx2 v∞ Z t Z Vx (t) g dVx (t′ ) = ⇒ dt′ ′ 2 v∞ 0 Vx (0) 1 − Vx (t ) ⇒ 1 + Vx g 1 ln = t 2 1 − Vx v∞ R dx 1 1+x car Vx (0) = 0 par hypothèse et 1−x 2 = 2 ln 1−x . Comme Vx < 1 car vx (t) < v∞ on peut supprimer les valeurs absolues dans le premier membre de l’équation précédente et on obtient 1 + Vx 2g 1 + Vx 2g ln = t ⇒ = exp t 1 − Vx v∞ 1 − Vx v∞ 2g t ⇒ 1 + Vx = (1 − Vx ) exp v∞ 2g 2g ⇒ Vx 1 + exp t = exp t −1 v∞ v∞ g g exp v2g t − 1 exp t − exp − t v∞ v∞ gt ∞ = = tanh ⇒ Vx (t) = v∞ 1 + exp 2g t exp − g t + exp g t v∞ v∞ v∞ Il en découle directement que vx (t) = v∞ tanh avec v∞ = q mg γ . gt v∞ (3.11) Lorsque t tend vers l’infini la tangente hyperbolique tend vers 1 et vx (∞) = v∞ comme anticipé au début de la démonstration. 17 L’équation horaire x(t) s’obtient alors par intégration de vx (t) entre les temps t′ = 0 et t′ = t vx (t) = dx dt Z t Z t vx (t′ )dt′ dx(t′ ) = ⇒ dx(t) = vx (t)dt ⇒ 0 0 ′ Z t gt ⇒ x(t) − x(0) = v∞ tanh dt′ v ∞ 0 Z t sinh gt′ v∞ sinh(x) ′ dt′ car x(0) = 0 par hypothèse et tanh(x) = cosh(x) ⇒ x(t) = v∞ 0 cosh gt v∞ ′ t 2 v gt ⇒ x(t) = ∞ ln cosh g v∞ 0 2 v gt ⇒ x(t) = ∞ ln cosh . g v∞ (3.12) On peut aisément vérifier que ce résultat est homogène à une longueur. En dérivant l’expression de vx (t), on obtient celle de l’accélération ax (t) : ax (t) = h cosh g ( gt v∞ i2 = g 2 ) gt 1 − tanh . v∞ (3.13) On remarque sur les expressions (3.9) et (3.13) que l’accélération de la balle vaut g au temps t = 0 ce qui est cohérent avec le fait que, la vitesse initiale étant nulle, la valeur de l’accélération correspond à celle de la chute libre. Aux temps ultérieurs (t > 0), les frottements entrent en jeu et l’accélération faiblit au cours du mouvement. 3.3 Expériences à réaliser 3.3.1 Matériel utilisé • Plusieurs balles de taille et de masse différentes. • Une caméra placée devant un mur qui servira d’arrière plan lors de l’enregistrement de la chute des balles. La vidéo enregistée par la caméra sera analysée à l’aide du logiciel Tracker qui permet d’extraire les temps et les positions des balles sur chaque image. La procédure d’utilisation de ce logiciel est présentée en annexe. Elle doit être suivie scrupuleusement afin d’obtenir des données exploitables. 3.3.2 Réalisation des enregistrements La dimension de l’image produite par la caméra étant plus longue selon l’axe des x que selon celui des y, la caméra sera tournée de 90◦ pour maximiser la durée de la prise de mesures lors de la chute des balles. La verticale (ie, la direction de chute) sera donc représentée par l’axe Ox et l’horizontale par l’axe Oy. Une règle placée sur le mur servira d’étalon permettant au logiciel Tracker de convertir les données de positions exprimées en pixels sur l’image en positions exprimées en mètres dans un repère à définir. Repère : Le repère défini dans Tracker étant composé de deux axes parallèles aux côtés de l’image, il n’est pas nécessaire dans ce TP d’aligner la verticale avec un des côtés de l’image car le mouvement est rectiligne. Notons que la trajectoire d’une balle est effectivement rectiligne si elle est lâchée sans vitesse initiale. 18 3.3.3 Exploitation des résultats Il faudra traiter et commenter les vidéos de deux balles significativement différentes. 1. Mesurer le diamètre et la masse de chaque balle. 2. Créer un répertoire de travail nommé Chute NOM1 NOM2 (NOM1 et NOM2 sont les noms des 2 membres du binôme) sur le bureau de l’ordinateur. 3. Générer un fichier texte à trois colonnes contenant le temps ti en colonne 1, les coordonnées x(ti ) en colonne 2 et les coordonnées y(ti ) en colonne 3 en prenant soin d’éliminer les points qui précèdent le début du mouvement de chute de la balle ainsi que ceux en fin de trajectoire lorsque la balle rebondit au sol. Appeler ce fichier Coordonnees xy.dat et placer le dans votre répertoire de travail. 4. Expliquer comment il est possible de calculer les vitesses (vx (ti ) et vy (ti )) et les accélérations (ax (ti ) et ay (ti )) de la balle à partir de vos données. 5. Ouvrir une fenêtre terminal (Ctrl + Alt + T), allez dans votre répertoire de travail et lancer l’exécutable balle-dynamique.exe (présent sur le PC ou fourni par l’enseignant) pour calculer les vitesses et les accélérations du mobile. Ces grandeurs seront tracées sur 2 figures séparées à l’aide du logiciel gnuplot : (a) Récupérer les fichiers Vitesses gnuplot.dat et Accelerations gnuplot.dat (présents sur le PC ou fournis par l’enseignant). (b) Dans votre répertoire de travail taper gnuplot puis les commandes load ‘Vitesses gnuplot.dat’ pour tracer les deux composantes des vitesses et load ‘Accelerations gnuplot.dat’ pour tracer les deux composantes des accélérations. Comme les axes définis pour les mesures ne sont généralement pas exactement verticaux et horizontaux, la norme du vecteur vitesse v est aussi tracée. v sera par ailleurs préférée à vx (t) pour les études numériques dans la suite du TP. Deux figures au format png devraient avoir été créées avec les vitesses et les accélérations de la balle (figures à tracer pour chacune des deux balles). 6. Selon le type de frottements subis par la balle, l’expression de sa vitesse peut varier. On va donc effectuer trois ajustements non linéaires sur des fonctions représentatives de chacun de ces cas : (i) chute libre (fonction: v(t) = a1 t avec a1 ∈ R), (ii) chute avec frottements linéaires (fonction: v(t) = a2 [1−exp(−gt/a2 )] avec a2 ∈ R), (ii) chute avec frottements quadratiques (fonction: v(t) = a3 tanh(gt/a3 ) avec a3 ∈ R). Pour ce faire, (a) Récupérer le fichier v-regression gnuplot.dat (présent sur le PC ou fourni par l’enseignant) et le placer dans votre répertoire de travail. (b) Rentrer dans le logiciel gnuplot puis taper la commande load ‘v-regression gnuplot.dat’. Si les régressions se passent correctement, les résultats associés devraient s’afficher à l’écran et être stockés dans un fichier nommé fit.log. Ces ajustements vous permettent-ils d’évaluer le coefficient de frottement de l’air ? Si oui, l’estimer. 7. Mesurer la distance totale d (= hauteur maximale) parcourue par les balles le long de la trajectoire. En déduire les expressions théoriques des énergies cinétique, potentielle, et mécanique. Les valeurs de ces énergies ont déjà pu être obtenues en lançant l’exécutable balle-dynamique.exe (voir plus haut). Récupérer le fichier Energies gnuplot.dat (présent sur le PC ou fourni par l’enseignant). Tracer les trois énergies sur un même graphique avec le logiciel gnuplot en utilisant la commande load ‘Energies gnuplot.dat’. L’énergie mécanique est-elle conservée ? Commenter. 8. Discuter la perte d’énergie mécanique de chaque balle. Quel type de balle vérifie le mieux la conservation de l’énergie mécanique lors d’un mouvement de chute ? 19 20 Compte-rendu du TP 3 (à rendre en fin de séance) NOM et Prénom 1 : NOM et Prénom 2 : Note (/7) : Tableau de mesures pour les deux balles (indiquer les masses et tailles des balles utilisées) t (s) x (m) y (m) vx (m s−1 ) vy (m s−1 ) t1 = t2 = t3 = t4 = t5 = t6 = t7 = t8 = t9 = t10 = t1 = t2 = t3 = t4 = t5 = t6 = t7 = t8 = t9 = t10 = 21 h (m) Ep (J) Ec (J) Em (J) Exploitation des résultats Calcul des vitesses et des accélérations Expression de vx (ti ) : Expression de ax (ti ) : Ajustements non linéaires de v(t) Ajustement sur la fonction f (x) : a1 = Ajustement sur la fonction g(x) : a2 = Ajustement sur la fonction h(x) : a3 = Commentaires : Valeur du coefficient de frottement de l’air ? Conservation de l’énergie Expression de l’énergie potentielle, Ep : Expression de l’énergie cinétique, Ec : Expression de l’énergie mécanique, Em : Commentaires : Quel type de balle vérifie le mieux la conservation de l’énergie mécanique ? Pourquoi ? (Joindre les figures utiles en annexe du compte-rendu) 22 Annexe 1 : Utilisation du logiciel Tracker Les vidéos enregistrées seront exploitées à l’aide du logiciel Tracker. La fenêtre principale du logiciel est présentée sur la figure 4.1. Après avoir ouvert le fichier vidéo créé, la première image de la vidéo est affichée à l’écran. On peut modifier l’image à afficher en déplaçant le curseur blanc sur la barre de défilement sous la vidéo. Les curseurs noirs permettent de sélectionner le début et la fin de la partie de la vidéo qu’il faudra analyser. Figure 4.1: Fenêtre principale du logiciel Tracker. 4.1 Principe de Tracker Le logiciel Tracker repère sur les images successives la position d’un élément de l’image qu’il faut préalablement sélectionner. Les distances sur une image sont exprimées en pixels (éléments constitutifs de l’image). Il convient 23 donc d’étalonner la vidéo en indiquant la conversion entre pixels et mètres. C’est dans ce but qu’une règle est placée à l’écran au début de la vidéo. Cette partie de la vidéo sera éliminée de l’analyse grâce aux curseurs noirs de la barre de défilement. La reconnaissance de l’objet repose essentiellement sur les couleurs de l’objet. Il est donc important qu’aucun autre objet de la même couleur que l’objet suivi n’apparaisse à l’écran durant l’analyse. 4.2 Procédure d’analyse d’une vidéo 1. Ouvrir la vidéo à analyser (menu F ichier → Ouvrirf ichier). 2. Choisir une image où apparaı̂t la règle graduée pour étalonner la caméra afin de mesurer les distances avec les bonnes unités. 3. Cliquer sur le bouton , et choisir Nouveau → bâton de calibration. Appuyez sur Majuscule + clic gauche ou droit (indifférent) aux extrémités de la règle pour faire apparaı̂tre le bâton de calibration. Le déplacer pour qu’il définisse la longueur connue affichée sur la vidéo. Double cliquer sur le chiffre au dessus de la barre bleue pour indiquer la valeur de la longueur selectionnée (dans l’unité de votre choix). 4. Faire défiler manuellement les images de la vidéo pour choisir l’image de début de l’expérience, c’est-à-dire le moment où on lâche l’objet. Placer le curseur noir sous la barre de défilement pour définir le début de l’analyse. 5. Cliquer sur le bouton pour afficher les axes qui apparaissent en violet. Centrer l’axe sur le point de départ de l’objet et tourner l’axe (en faisant un cliquer, glisser sur le tiret violet qui apparaı̂t à l’extrémité de l’axe) pour obtenir l’orientation désirée. 6. Cliquer sur le bouton et choisir Masse ponctuelle. 7. En maintenant les touches Maj + Ctrl enfoncées cliquer sur la zone de l’image où se trouve l’objet. Une fenêtre apparaı̂tra telle que celle illustrée sur la figure 4.2. Si l’objet est assez lent, l’analyse automatique est possible, il faudra alors cliquer sur Chercher pour repérer automatiquement l’objet sur les images qui se succèdent. 8. Si le logiciel s’arrête, c’est qu’il ne parvient plus à trouver l’objet. On recommence alors le point précédent jusqu’à atteindre l’image de fin. 9. Une analyse manuelle peut être réalisée en cliquant sur l’objet avec la touche Maj enfoncée. Les images défilent alors automatiquement. 10. A la fin de l’analyse, les données sont stockées dans le tableau à droite de la vidéo. Il est alors à nouveau possible de modifier des paramètres de l’acquisition (longueur étalon ou orientation des axes). Les coordonnées des points sont ensuite recalculées pour refléter ces changements. 24 Figure 4.2: Fenêtre de repérage de l’objet. 25 Annexe 2 : Recommandations sous Linux Ubuntu Les fichiers à colonnes multiples tels que Coordonnees xy.dat doivent impérativement être écrits au format texte (ASCII) et non dans des formats binaires (.doc, .odt, etc.). Voici un exemple de début de fichier au format texte tel qu’attendu : # t i (s) 0.000 .. . x i (m) 1.000 .. . y i (m) 1.500 .. . Vous noterez que la première ligne ne doit pas contenir de données. Elle est dédiée au détail du contenu des colonnes. Les programmes ne fonctionneront pas sans un fichier d’entrée respectant le format précédent. Les étudiants sont fortement encouragés à copier les fichiers des répertoires TP1 Pendule, TP2 Mobile, ou TP3 Chute-libre dans leur répertoire personnel. L’exécution des programmes fortran du type programme.exe s’effectue en tapant ./programme.exe dans votre répertoire depuis la fenêtre terminal et en suivant les indications affichées à l’écran. En cas de problème : 1. Pour trouver ou générer un fichier d’entrée au format texte. 2. Pour trouver ou exécuter un programme. 3. Pour trouver un logiciel (eg, Tracker ou gnuplot). 4. Avec le système d’exploitation (eg, icône non fonctionnelle). 5. etc. veuillez vous rapprocher de l’un de vos enseignants de TP. A la fin du TP veuillez aussi déplacer toutes vos données dans le répertoire Sauvegarder vos données qui devrait se trouver sur le bureau de votre ordinateur. 26