Cours: Technologie de construction - Hyperstatisme et Mobilité
Telechargé par
slimani asma

Analyse des systèmes mécaniques
1/10
Cours de : Technologie de construction Licence 2 en Génie Mécanique
Objectifs
-
Déterminer le degré d’hyperstatisme et la mobilité d’un système
mécanique.
- Proposer les solutions adéquates pour remédier aux
problèmesd’hyperstatisme.
- Pour maîtriser le comportement d’un mécanisme (afin, par exemple, d’obtenir une précision
voulue de mise en position d’une pièce par rapport à une autre, ou d’éviter une usure prématurée,
un coincement, ou un montage impossible) il faut connaître précisément la position relative de
chaque liaison, ainsi que les torseurs d’actions mécanique correspondants.
I/- Hypothèse de l’étude :
- Les résultats que nous allons mettre en place seront valables pour :
Des pièces modélisées par des solides indéformables.
Des liaisons sans frottement.
Des liaisons à contact bilatéral c'est-à-dire des liaisons dans les quelles le contact est supposé
maintenu si le sens des actions mécaniques est inversé.
Des pièces de masses supposées nulles.
II/- Définitions :
II-1/- Mécanisme :
- C’est un assemblage d’éléments capables de transformer l’énergie mécanique (exemple : système
bielle manivelle, vis écrou, réducteur…).
- Un mécanisme possède au moins une entrée où l’on applique l’action motrice et au moins, une
sortie réceptrice.
II-2/- Loi entrée - sortie :
- Il s’agit d’une relation entre les variables d’entrée et de sortie.
II-3/- Mobilités utiles :
- Elles justifient le mécanisme. Par exemple dans une automobile, la translation du piston entraîne
la rotation de la roue après embrayage.
==> Posons m
u
le nombre de mobilités utiles.
II-4/- Mobilités internes :
- Elles n’interviennent pas dans le fonctionnement du mécanisme. Par exemple, l’axe du piston le
reliant à la bielle peut tourner autour delui-même.
==> Posons m
i
le nombre de mobilité interne.
II-5/- Isostatisme et hyperstatisme :
- Lors qu’on peut déterminer les actions mécaniques à l’aide des seules équations de la statique, on
dit que le système est isostatique ; si non il est classéhyperstatique.
III/- Notations :
n
c
: nombre d’inconnuescinématiques
e : nombre de degrés de liberté
Pour une liaison
n
c
= e
n
s
: nombre d’inconnus statiques de liaisons Pour une liaison
n
c
+ n
s
= 6

Analyse des systèmes mécaniques
Cours de : Technologie de construction
IV/-
Degré d’hyperstatisme :
IV-1/- Etude statique :
-
Pour un mécanisme comprenant avec le bâti
bâti, conduit à 6.(n-1)
équations.
L’ensemble des mobilités procure
genre 0=0).
Pour un mécanisme isostatique
Pour un mécanisme hyperstatique
D’où
IV-2/- Etude cinématique :
- Pour chaque boucle fermée
indépendante
Cela procure 6 relations algébriques.
-
Compte tenu des mobilités m, on peut écrire
Pour un mécanisme isostatique
Pour un mécanisme hyperstatique
V/-Liaison Equivalente :
-
Supposant qu’il existe entre deux pièces (S
pièces intermédiaires.
-
La liaison équivalente à l’ensemble des liaisons situées entre les pièces (S
théorique de référence (L
12
) qui
- C’est-à-
dire qui transmet la même action mécanique et qui autorise le même mouvement.
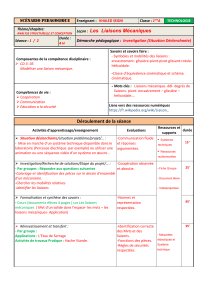
V-1/- Liaisons en parallèle :
V-1-1/- Définition :
h = m
S
S
- n liaison (L
1
), (L
2
),… et (L
n
) sont disposées en
parallèle entre deux solides (S
liaison relie directement ces deux solides.
-
Le graphe des liaisons se trace ainsi
2/10
Cours de : Technologie de construction
Licence 2 en Génie Mécanique
Degré d’hyperstatisme :
Pour un mécanisme comprenant avec le bâti
n sous ensemble
s, l’isolement de chacun, excepté le
équations.
L’ensemble des mobilités procure
m
u
relations dépendantes et m
i
relations n
Pour un mécanisme isostatique
:
Pour un mécanisme hyperstatique
:
Avec h : représente le degré d’hyper
statisme
indépendante
du graphe de liaison (ou de structure) on peut écrire
Cela procure 6 relations algébriques.
Compte tenu des mobilités m, on peut écrire
:
Pour un mécanisme isostatique
: n
c
– 6 = m
Pour un mécanisme hyperstatique
:n
c
– 6 = m – h
Supposant qu’il existe entre deux pièces (S
1
) et (S
2
) plusieurs liaisons réalisées avec ou sans
La liaison équivalente à l’ensemble des liaisons situées entre les pièces (S
) qui
a
le même comportement que cette association de liaisons.
dire qui transmet la même action mécanique et qui autorise le même mouvement.
6.(n
-
1)
–
(m
u
+ m
6.(n
-
1)
–
(m
u
+ m
i
) =
h = m
u
+ m
i
- 6.(n -1) + ∑ n
s
Avec
:
∑
{υ
i
}
A
=
{o}
A
S
3
S
1
S
2
L
2
L
1
L
3
L
4
L
12
S
1
S
2
) sont disposées en
parallèle entre deux solides (S
1
) et(S
2
) si chaque
liaison relie directement ces deux solides.
Le graphe des liaisons se trace ainsi
:
Fig 2
Fig 1
Licence 2 en Génie Mécanique
s, l’isolement de chacun, excepté le
relations n
on significatives (du
statisme
.
du graphe de liaison (ou de structure) on peut écrire
:
) plusieurs liaisons réalisées avec ou sans
La liaison équivalente à l’ensemble des liaisons situées entre les pièces (S
1
) et (S
2
) est la liaison
le même comportement que cette association de liaisons.
dire qui transmet la même action mécanique et qui autorise le même mouvement.
+ m
i
) =
∑ n
s
) =
∑ n
s
–
h
:
m = m
u
+ m
i
Fig 3

Analyse des systèmes mécaniques
Cours de : Technologie de construction
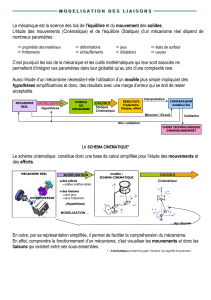
V-1-2/-
Détermination de la liaison équivalente
a/- Méthode statique :
-
Pour déterminer les caractéristiques du torseur statique de la liaison équivalente, appliquer
l’expression suivante :
Exemple :
Questions :
1/-
Tracer le graphe de liaison.
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
2/- Déterminer le torseur
statique de la liaison équivalente aux deux liaisons en parallèle (L
(L
2
)
……………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
b/- Méthode cinématique :
- Le tor
seur cinématique de la liaison équivalente doit être compatible avec tous les torseurs
cinématiques des liaisons (L
i
)
:
1
2
{
τ
}
M
=
∑
{
υ
}
M
=
{
υ
1
}
M
=
{
υ
3/10
Cours de : Technologie de construction
Licence 2 en Génie Mécanique
Détermination de la liaison équivalente
:
Pour déterminer les caractéristiques du torseur statique de la liaison équivalente, appliquer
Tracer le graphe de liaison.
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
statique de la liaison équivalente aux deux liaisons en parallèle (L
……………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
………………………………………
…………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………
………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
seur cinématique de la liaison équivalente doit être compatible avec tous les torseurs
:
Schéma cinématique
O A
(L
1
)
2
Y
1
Fig 4
i=1
∑ {
τ
i
}
M
n
{ τ }
M
:
Torseur statique
liaison équivalente.
{ τ
i
}
M
:
Torseurs statique des
liaisons en parallèles.
{ υ }
M
la liaison équivalente
{ υ
n
}
« n »
liaisons en parallèles.
υ
2
}
M
= …. =
{
υ
n
}
M
Licence 2 en Génie Mécanique
Pour déterminer les caractéristiques du torseur statique de la liaison équivalente, appliquer
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
statique de la liaison équivalente aux deux liaisons en parallèle (L
1
) et
……………………………………………………………………………………………………
.
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
seur cinématique de la liaison équivalente doit être compatible avec tous les torseurs
OA = L X
Schéma cinématique
X
(L
2
)
Torseur statique
de la
Torseurs statique des
« n »
liaisons en parallèles.
M
:
Torseur cinématique de
la liaison équivalente
.
}
M
:
Torseurs cinématique des
liaisons en parallèles.

Analyse des systèmes mécaniques
4/10
Cours de : Technologie de construction Licence 2 en Génie Mécanique
∑
=
n
i
s
i
n
1
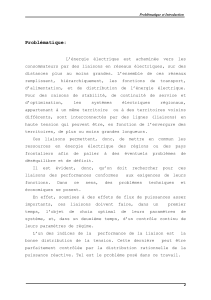
Exemple :
Question :
Déterminer la nature de la liaison équivalente aux deux liaisons en parallèle (L
1
) et(L
2
).
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
V-1-3/- Hyperstatisme :
- Le nombre des inconnues statiques introduit par le n liaisons en parallèle est : n
s
=
- Soit r
s
le nombre d’équations scalaires indépendantes (r
s
≤
6).
- Le degré d’hyperstatisme hde la liaison équivalente auxn liaisons en parallèle est :
Lorsque h = 0 la liaison équivalente est dite isostatique.
h
>
0 la liaison équivalente est dite hyperstatique d’ordre h.
- Leshinconnues statiques qui ne peuvent pas être calculées en fonction des composantes X, Y, Z, L,
M et N du torseur statique de la liaison équivalente sont appelées inconnueshyperstatiques.
V-1-4/- Mobilité :
- Le degré de mobilité m de la liaison équivalente au n liaisons en parallèle est :
Lorsquem = 0 la liaison équivalente est dite complète ou rigide.
m
>
0 la liaison équivalente est dite à mobilité à
«
m » degré de liberté.
X
Y
O A
(L
1
) (L
2
)
1
2
L
1
2
1
L
2
OA = L
X
h = n
s
- r
s
m = 6 - r
s
Fig 5

Analyse des systèmes mécaniques
5/10
Cours de : Technologie de construction Licence 2 en Génie Mécanique
V-2/- Liaisons en série :
V-2-1/- Définition :
- n liaison (L
1
), (L
2
),… et (L
n
) sont disposées en série entre deux solides (S
0
) et(S
n
) si elles sont
disposées à la suite l’une de l’autre par l’intermédiaire de (n-1) solides.
- Le graphe des liaisons se trace ainsi :
V-2-2/- Détermination de la liaison équivalente :
a/- Méthode statique :
- Le torseur statique {
τ
i
}de la liaison (L
i
) représente dans cette étude l’action mécanique du solide
(i-1) sur le solide (i). Et par conséquent, le torseur {
τ
}de la liaison équivalente représente l’action
mécanique du solide (0) sur le solide (n). Il doit vérifier la relation suivante :
Exemple :
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
{
τ
}
M
=
{
τ
1
}
M
=
{
τ
2
}
M
= …. =
{
τ
n
}
M
{ τ }
M
:
Torseur statique de la
liaison équivalente
.
{ τ
n
}
M
:
Torseurs statiquedes n
liaisons en série.
0
(L
1
) 1
(L
2
) 2
(L
3
) (L
i
) i (L
i+1
) (L
n
) n
1
0
2
- Soit une chaîne continue ouverte constituée par trois solides
(0), (1) et (2).
Questions :
1/-
Tracer le graphe de liaison et déduire le schéma
cinématique du système.
2/-
Déterminer le torseur statique de la liaison équivalente
(L
2
0
)
.
Fig 6
Fig 7
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%