Année Scolaire 2022-2023
Niveau : 2ème année
Corrigé Devoir No.1
Exercice1
1. système linéaire : dy
dt +y=e
2. système non linéaire : dy
dt +ey2= 3
3. système invariant : dy
dt +y=e
4. système variant :dy
dt + (t+ 1)y=e
Exercice2
Le système S3est à éliminer car il s’agit d’un 2nd ordre pseudo-périodique. S1et
S2ont à priori l’allure d’un 1er ordre, sauf que la courbe de réponse de S1présente
une tangente horizontale et donc il s’agit d’un 2nd ordre.
Et par conséquent, la réponse indicielle qui pourrait représenter ce moteur à courant
continu est celle de S2.
Exercice3
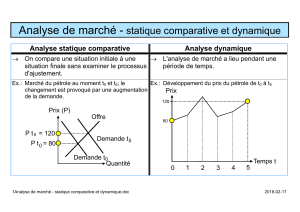
Identification de S4
On relève de la figure les caractéristiques suivantes :
dépassement : D%=30% = 0.3
temps 1er pic : tpic = 4.8s
temps de montée : tm= 3s
temps de réponse : tr= 11s
pseudo-période : Tp= 9.6s
1ère méthode : calcul analytique :
De D% = e
−
πξ
√1−ξ2on tire : ξ=1
v
u
u
t1 + π
ln(D)!

Fig. 1 –S4
D’où :
ξ= 0.358
De tpic =π
ω0√1−ξ2on tire ω0=π
tpic√1−ξ2
D’où :
ω0= 0.7rad/s
D’autre part, le gain statique est : 1.2
1
Soit :
K= 1.2
Conclusion : H(p) = 1.2
p2
0.72+2×0.358
0.7p+ 1
Soit aussi :
H(p) = 1.2
2.04p2+ 1.02p+ 1 ∼1.2
2p2+p+ 1
2ème méthode : utilisation des tables :
D= 30% => ξ∼0.35 et ω0tm= 2.06
Or tm= 3sdonc ω0=2.06
3∼0.69
2

D’où : H(p) = 1.2
p2
0.692+2×0.35
0.69 p+ 1
Soit aussi :
H(p) = 1.2
2.1p2+ 1.01p+ 1 ∼1.2
2p2+p+ 1
Autre méthode D= 30% => ξ∼0.35 et ω0tr= 7.9
Or tr= 11sdonc ω0=7.9
11 ∼0.72
D’où : H(p) = 1.2
p2
0.722+2×0.35
0.72 p+ 1
Soit aussi :
H(p) = 1.2
1.93p2+ 0.97p+ 1 ∼1.2
2p2+p+ 1
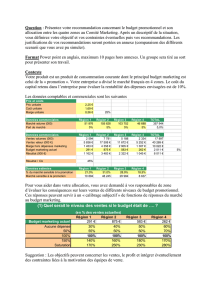
Identification de S5
Fig. 2 –S5
Il s’agit d’un 1er ordre avec retard.
On relève de la courbe :
3

gain statique : K= 1.2
retard : a= 0.8s
constante de temps : τ= 2.8-0.8=2s
D’où :
H(p) = e−0.8p1.2
1+2p
Exercice4
Soit un système défini par une fonction de transfert H(p)comme suit :
H(p) S(p)E(p)
I)- Pour un système de 1er ordre tel que H(p) = 3
1+2p:
1. constante de temps du système : τ= 2s
2. gain statique pour une entrée échelon : K= 3
3. Pour une entrée échelon unitaire, Y(p) = H(p)×E(p) = 3
p(1 + 2p)D’où
(d’après les tables) :
y(t) = 3(1 −e−0.5t)
4. temps de réponse du système : tr= 3τ= 6s
5. Pour une entrée en rampe unitaire, Y(p) = H(p)×E(p) = 3
p2(1 + 2p)D’où
(d’après les tables) :
y(t) = t−τ−τe
−
t
τ=t−2−2e−0.5t
II)- Pour un système tel que H(p) = 3p+ 2
2p+ 3p2+p3
1. H(p) = 3p+ 2
2p+ 3p2+p3=1
p×
1 + 3
2p
1 + 3
2p+1
2p2
(a) Gain statique=1, classe=1, et ordre du système=2 ;
(b) les zéros du système : p=−2
3
(c) les pôles du système : p2+ 3p+ 2 = 0 => ∆=32−4×2=1
=> p1/2=−3±1
2
Soit :
p1=−1
p2=−2
4

2. réponse du système à un échelon unitaire :
Y(p) = H(p)E(p) = 3p+ 2
p2(2 + 3p+p2)=3p+ 2
p2(p+ 1)(p+ 2)
Y(p) = 3/2
p(p+ 1)(1
2p+ 1)
+1
p2(p+ 1)(1
2p+ 1)
Or 3/2
p(p+ 1)(1
2p+ 1)
=> y1(t) = 3
2
1−
e−t−1
2e−2t
1−1
2
y1(t) = 3
2−3e−t+3
2e−2t
Et 1
p2(p+ 1)(1
2p+ 1)
=2
p2(1 + p)−1
1 + 1
2p
D’où y2(t) = 2(t−1 + e−t)−(t−1
2+1
2e−2t) = t−3
2+ 2e−t−1
2e−2t
y2(t) = t−3
2+2e−t−1
2e−2t
D’où :
y(t) = t−e−t+e−2t
12 Déc. 2022 M.T ALEB
5
1
/
5
100%