Devoir: Méthodes Numériques et Informatique - Génie Mécanique
Telechargé par
Mohammed Mamdouh

Ecole Normale Supérieure de l'Enseignement Technique – Rabat
Département Génie Mécanique
CPA – Génie Mécanique
Devoir de Méthodes numériques et informatique
Durée : 3 heures Documents de cours personnels autorisés
I. Résolution d'une équation non linéaire par la méthode de la fausse positioon.
Théorème :
Considérons une fonction f continue sur un intervalle [a,b] pour laquelle il existe un
nombre réel r appartenant à l'intervalle [a,b] tel que f(r)=0. Si f(a) et f(b) sont de signes
opposés, alors la suite dont le terme est donné par la relation suivante converge vers r :
)()(
)()(
nn
nnnn
nafbf
afbbfa
c−
−
=
an et bn sont les bornes de l'intervalle modifiées en fonction de la position de cn, comme dans
le processus de la méthode de dichotomie.
I.1. Appliquer cette méthode pour la résolution de l'équation 0104 23 =−+ xx sur
l'intervalle [1,2]
I.2. Ecrire le programme C qui permet la mise en œuvre de cette méthode. La fonction doit
être écrite hors du bloc main.
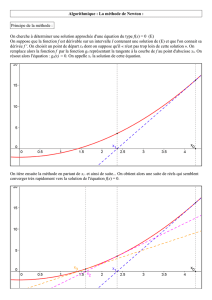
II. Méthode de Newton
On considère la fonction f(x)=x3-3x+2.
II.1. Représenter graphiquement f(x) sur l'intervalle [-3,3]
II.2. Résoudre l'équation f(x)=0 par la méthode de Newton en prenant successivement pour
valeurs initiales -2.4 et 1.2, avec une précision de 10-4 sur x.
II.3. Conclure.
II.4. Montrer que la solution x = 1 est d'ordre de multiplicité 2 (racine double). Le résultat
de II.2. est imputé à cette situation. Pour améliorer la convergence de la méthode de Newton
pour une racine d'ordre de multiplicité m>1, on utilise la méthode modifiée suivante
)('
)(
1
k
k
kk xf
xf
mxx −=
+
Appliquer cette dernière pour l'équation considérée avec les mêmes conditions qu'au II.2.
Conclure.
III. généralisation de la méthode de Newton aux systèmes d'équations non linéaires.
On se propose de généraliser la méthode de Newton au cas de systèmes non linéaires.
Considérons le système de n équations (n>1) suivant :

=
=
=
=
0),...,,...,,(
.
.
0),...,,...,,(
.
.
0),...,,...,,(
0),...,,...,,(
21
21
212
211
njn
nji
nj
nj
xxxxf
xxxxf
xxxxf
xxxxf
Ce système peut aussi s'écrire sous la forme vectorielle 0)(
r
r
r
=xf
III.1. Ecrire l'expression de i
f
∆
en fonction des i
x
∆
et des dérivées partielles de fi. En
déduire, que l'on peut écrire :
xJf
r
r
∆=∆ .
Préciser l'expression de la matrice J.
III.2. En faisant un raisonnement analogue à celui conduit pour le cas d'une seule équation,
établir la formule de Newton généralisée aux systèmes non linéaires suivante :
)().(
1
1kkkk xfxJxx
r
r
r
r
−
+−=
III.3. Appliquer cette méthode pour la résolution du système suivant :
=−++
=+−+−
0444
01422
44
23
yyx
xxy
On formulera le problème et on effectuera uniquement 2 itérations à partir de
(x0,y0)=(0.1,0.7)
III.4. Ecrire le programme C qui met en œuvre cette méthode.
1
/
2
100%