Université Docteur Tahar Moulay de Saïda – Faculté de Technologie – Master Electrotechnique Industrielle – TP N 1 du module Techniques d’intelligence artificielle
Année universitaire 2020 – 2021 Page 1
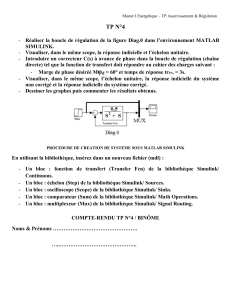
But du TP : On désire commander la vitesse d’un moteur à courant continu en utilisant
un contrôleur PI comme indiqué dans la figure suivante. Le contrôleur détermine la
valeur adéquate du rapport cyclique du hacheur utilisé pour l’alimentation du moteur
CC afin de conduire la vitesse du moteur vers sa
valeur de consigne
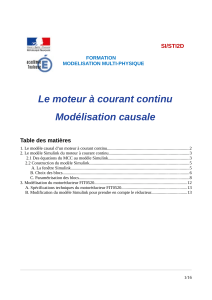
Le modèle SIMULINK du MCC est donné par
Avec :
Ω (Résistance d’induit) ; : (Inductance d’induit)
(Moment d’inertie) ; (Coefficient de frottement).
(Constante du moteur)
Le capteur de vitesse est une génératrice tachymétrique qui génère pour
et qui est donc considéré comme un gain .
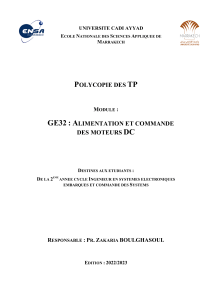
Le modèle SIMULINK du hacheur est modélisé par un gain donné par la figure
suivante:
Le modèle SIMULINK du contrôleur PI est donné par la figure suivante ;
Etapes de la simulation :
1. Réaliser le modèle Simulink du moteur suivant où les blocs MCC, Hacheur et
contrôleur de vitesse sont des sous systèmes masqués (Utiliser create subsystem
et mask subsystem)
2. En utilisant les paramètres de simulations suivants :
, , ,
Exécuter la simulation du modèle pour une consigne de , une charge
de et une perturbation de charge de à .
Utiliser le graphe de la vitesse pour mesurer et noter sur le tableau donné ci-
dessous le dépassement, le temps de réponse , la chute maximale de vitesse et
le temps de rejet de la perturbation.
3. Répondre aux questions posées.
Nom et prénom :

Université Docteur Tahar Moulay de Saïda – Faculté de Technologie – Master Electrotechnique Industrielle – TP N 1 du module Techniques d’intelligence artificielle
Année universitaire 2020 – 2021 Page 2
Charge de et perturbation de à
Dépassement
Temps de réponse
Effet de la perturbation
Chute de vitesse
Temps de rejet
et
et
et
Quel est l’effet de l’augmentation du gain intégrateur sur :
Le temps de réponse
Interprétez vos résultats et donnez votre conclusion
:
:
Le dépassement
La chute de vitesse
Le temps de rejet
1
/
2
100%