P
GE32 :
A
DE LA 2EME
ANNEE CYCLE
EMBARQUES ET COMMAND
R
ESPONSABLE
ECOLE
N
P
OLYCOPIE DES TP
MODULE :
ALIMENTATION ET COMMA
DES MOTEURS DC
DESTINES AUX ETUDIANTS :
ANNEE CYCLE
INGENIEUR EN SYSTEMES
ELECTRONIQUES
EMBARQUES ET COMMAND
E DES SYSTEMS
ESPONSABLE
: PR. ZAKARIA
BOULGHASOUL
EDITION : 2022/2023
UNIVERSITE CADI AYYAD
N
ATIONALE DES SCIENCES A
PPLIQUEE DE
MARRAKECH
LIMENTATION ET COMMA
NDE
ELECTRONIQUES
BOULGHASOUL
PPLIQUEE DE

GE32 : Alimentation et commande des moteurs DC
Pr. Z. Boulghasoul 1
TP N° 1 : COMMANDE D’UN HACHEUR ALIMENTANT UNE CHARGE RLE
OBJECTIFS DU TP :
1. Maitriser la bibliothèque Simpower System de l'environnement Matlab/Simulink pour
l'analyse et la conception des montages de l'électronique de puissance
2. Apprendre à mettre en œuvre les techniques de pilotage et de contrôle des convertisseurs
DC/DC réversibles.
1. MONTAGES ET MANIPULATIONS
1.1. MONTAGE HACHEUR SERIE
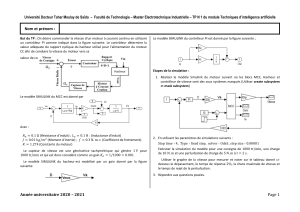
Réaliser le montage donné sur la figure 1 en considérant les éléments du circuit suivants :
Source de tension continue Vdc=50V.
Récepteur de type RLE avec R=10
et L=100mH. E=0V puis 8V.
Les différents interrupteurs sont commandés initialement à une fréquence de commande f=500Hz.
Les montages sont réalisés en utilisant les composants IGBTs de la bibliothèque Simpower systems.
La commande utilisée pour ce premier montage est la suivante :
- de 0 à T/2 : l'IGBT est passant.
- de T/2 à T : l'IGBT est bloqué.
Figure 1 : Montage hacheur série
Pour réaliser le montage dans l'environnement Simulink, suivre les étapes décrites ci-dessous :
Menu Simpower Systems >
Power electronics> IGBT , Diode
Electrical Sources > DC voltage source
Elements > Serie RLC branch
Measurements> Current measurement, voltage measurement,
Menu SIMULINK >
Math Operation > …
Signal Rooting > Mux (multiplexeur)…
Sinks > Dislay (affichage numérique), Scope (oscilloscope) …
Sources > Pulse Generator (impulsions)
1.2. TRAVAIL DEMANDÉ
1. Relever pour =0, 25%, 50%, 75% et 100%, sous forme de tableau, la tension moyenne aux
bornes de la charge, le courant ic dans la charge et ceci dans les cas E=0V et E=8V. Interpréter
les résultats obtenus.

GE32 : Alimentation et commande des moteurs DC
Pr. Z. Boulghasoul 2
2. Relever :
la forme de la tension aux bornes de la charge RLE pour E=0V et E=8V
la forme du courant ic dans la charge
la forme du courant it et iD (Expliquer les formes obtenues)
3. Vérifier l'effet de l'inductance L et la fréquence f sur l'ondulation du courant
1.3. HACHEUR A POINT MILIEU
Réaliser le montage donné à la figure 2 en considérant les valeurs des éléments précédents :
Figure 2 : Montage hacheur à point milieu
Les interrupteurs sont commandés de façon complémentaire :
- de 0 à T/2: IGBT1 est passant / IGBT2 est bloqué.
- de T/2 à T: IGBT1 est bloqué / IGBT2 est passant.
1.4. TRAVAIL DEMANDÉ
1. Donner l'expression de la valeur moyenne de la tension aux bornes de la charge R.L.E
Relever pour =0, 25%, 50%, 75% et 100%, sous forme de tableau, la tension moyenne aux
bornes de la charge, le courant ic dans la charge et ceci dans les cas E=0V et E=8V.
2. Relever la forme du courant ic et de la tension aux bornes de la charge et étudier l'effet de la
variation de L et f sur l'ondulation du courant.
3. Quels sont les avantages et les inconvénients de ce montage ?
1.5. HACHEUR 4 QUADRANTS
Réaliser le montage donné à la figure 3 en considérant les valeurs des éléments précédents :
Figure 3 : Montage hacheur 4 quadrants

GE32 : Alimentation et commande des moteurs DC
Pr. Z. Boulghasoul 3
Les interrupteurs sont commandés deux à deux de façon complémentaire :
- de 0 à T/2: les transistors IGBT1 et IGBT4 sont passants / les transistors IGBT2 et IGBT3 sont
bloqués.
- de T/2 à T: les transistors IGBT1 et IGBT4 sont bloqués / les transistors IGBT2 et IGBT3 sont
passants.
1.6. TRAVAIL DEMANDÉ
1. Reprendre les mêmes questions en déduire l'avantage par rapport au montage précédent.
2. COMMANDE PAR MODULATION DE LARGEUR D'IMPULSION
Dans les montages précédents, on utilise des générateurs d’impulsions pour générer des signaux
rectangulaires avec rapport cyclique variable. L’utilisation de ce type de commande est limité vu
qu'il nécessite un arrêt de tout le système pour modifier le programme conformément aux besoins,
chose qui n’est pas pratique pour les utilisateurs. La méthode la plus efficace consiste à utiliser la
technique de Modulation de Largeur d’Impulsion (MLI) qui permet d'avoir à tout instant t Uref =Vc.
2.1. PRINCIPE DE LA MODULATION DE LARGEUR D'IMPULSION
Le principe de la MLI consiste à comparer la tension de référence Vref avec un signal triangulaire Vtri
d'une haute fréquence dont les extrémités sont définies entre
DC
V
tel que :
Si Vref > Vtri : le signal de commande S=1, les 2 interrupteurs IGBT1 et IGBT3 sont à l'état fermé. La
tension aux bornes de la charge est égale à +Vdc.
Si Vref < Vtri : le signal de commande S=0, les 2 interrupteurs IGBT2 et IGBT4 sont à l'état fermé. La
tension aux bornes de la charge est égale à -Vdc.
La figure suivante illustre ce principe :
Figure 4 : Principe de la modulation de largeur d'impulsion
DC
V
réf
V
D
E
A
B
C
2
T
T
t
tri
V
2
T
T
t
S
1

GE32 : Alimentation et commande des moteurs DC
Pr. Z. Boulghasoul 4
Vu la symétrie du signal, on peut calculer le rapport cyclique sur une demi période :
2
t
T
D'après la figure 4, nous avons :
1
DC EB EB
DC DC
Nous avons également :
tan EB DC EB AB
AB AC DC AC
d'où
1AB AC AB
AC AC
Donc :
ref ref DC
DC
VVV
V
2.2. TRAVAIL DEMANDÉ
1. Montrer que le principe de la MLI reste toujours valable pour le cas d'un hacheur 4 quadrants.
2. Tester la commande MLI pour les différentes topologies étudiées précédemment.
3. CONTROLE DE COURANT AVEC COMPARATEUR A HYSTERESIS
Cette commande consiste à imposer au courant dans la charge une valeur de référence donnée. Cela est
obtenu en comparant le courant de référence
*
a
i
au courant absorbé par la charge
a
i
,ce qui nécessite
l’usage d’un capteur de courant.
Le principe est illustré comme suit. Dans le cas d'un Hacheur à point milieu, et à partir d'une valeur de
comparaison ∆i=
*
aa
ii
, on génère les signaux de commande des transistors
Si le courant est décroissant et donc ∆i =e l'IGBT1 est ON et IGBT2 est OFF
Si le courant est croissant et donc ∆i =-e l'IGBT1 est OFF et IGBT2 est ON
3.1. TRAVAIL DEMANDÉ
Réaliser la commande par hystérésis du hacheur à point milieu et relever la forme de la
tension et du courant dans la charge pour un échelon de courant de référence.
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%