Exercices et examens résolus: Mécanique du point matériel
M. BOURICH 41
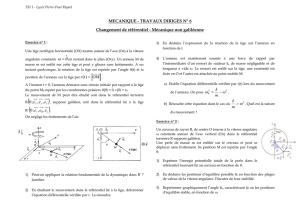
Exercice 1
Soient (,) un référentiel absolu muni de la base (,,
) et 1(,,
) le référentiel
relatif. Dans le plan horizontal (), une tige circulaire de rayon et de centre est
maintenue fixe. Un anneau de masse est assujetti à se déplacer sans frottement sur la tige
circulaire. Il est repéré dans par :
= 2 où = (,
)
avec
2<<
2 .
L’anneau est attaché à l’extrémité d’un ressort de raideur et de longuer à vide . L’autre
extrémité du ressort est fixée au point . En plus de la force de rappel exercée par le
ressort, l’anneau est soumis à la réaction de la tige
et à son poids
=
. On
désigne par (,
,
) la base de Frénet comme l’indique la figure (
est le vecteur dirigé vers
le centre de cercle).
N.B : Toutes les expressions vectorielles doivent être exprimées dans la base ( , ,
).
1) a) Calculer la vitesse de par rapport à .
b) En déduire le vecteur tangent à la trajectoire.
c) Calculer le vecteur
normal à la trajectoire.
2) Donner les expressions des forces appliquées à dans .
3) a) Ecrire le PFD appliqué à dans .
b) En projetant le PFD sur , donner l’équation différentielle du mouvement de dans .
c) Que devient cette équation pour des faibles valeurs de .
d) En projetant le PFD sur
et
, trouver les composantes de la réaction
du support sur .
4) a) Calculer (/) le moment cinétique par rapport au point de dans .
b) Calculer les moments dynamiques par rapport à des forces appliquées à dans .

Exercices et examens résolus: Mécanique du point matériel
M. BOURICH 42
c) En appliquant le théorème du moment cinétique, retrouver l’équation différentielle du
mouvement de dans .
Corrigé
Soient (,) un référentiel absolu muni de la base (,,
) et 1(,,
) le référentiel
relatif. Dans le plan horizontal (), une tige circulaire de rayon et de centre est
maintenue fixe. Un anneau de masse est assujetti à se déplacer sans frottement sur la tige
circulaire. Il est repéré dans par :
= 2 où = (,
)
avec
2<<
2 .
L’anneau est attaché à l’extrémité d’un ressort de raideur et de longuer à vide . L’autre
extrémité du ressort est fixée au point . En plus de la force de rappel exercée par le
ressort, l’anneau est soumis à la réaction de la tige
et à son poids
=
. On
désigne par (,
,
) la base de Frénet comme l’indique la figure (
est le vecteur dirigé vers
le centre de cercle).
N.B : Toutes les expressions vectorielles doivent être exprimées dans la base ( , ,
).
1) Calculer
(/) la vitesse de par rapport à .
(/) =
=
2= 2+
2) En déduire les expressions des vecteurs tangent et normal
à la trajectoire au point .
=
(/)
(/)=+
=
=
+ =
3) Déterminer
1/ la vitesse de rotation de 1 par rapport à .

Exercices et examens résolus: Mécanique du point matériel
M. BOURICH 43
1/=
4) Déterminer les accélérations relative (), d’entraînement () et de Coriolis () de
.
() = 2
21
=2
221
=2+2
() =
2+
(
2) = 2 22
() = 2
() = 2
2()=42
5) Donner les expressions des forces appliquées à dans 1.
=
=
+
=()=(21)
=() = 2( 2)
=() = 42
6) Ecrire le PFD appliqué à dans 1.
+
+++=()
7) a) En projetant le PFD sur , donner l’équation différentielle du mouvement de .
Tout calcul fait conduit à : +
2(1 2)= 0
b) Que devient cette équation pour des faibles valeurs de .
2= 0 ( et 1)
8) En projetant le PFD sur
et
, trouver les composantes de la réaction
du support sur .
Tout calcul fait donne : = et =(21)+ 42

Exercices et examens résolus: Mécanique du point matériel
M. BOURICH 44
Exercice 2
Soit (,) un référentiel orthonormé direct et Galiléen, muni de la base ,,
. Soit
un point matériel de masse . Le point glisse sans frottement le long de la tige () qui
tourne dans le plan horizontal () autour de l’axe () avec une vitesse angulaire
constante (= et > 0). est soumis, en plus de son poids
et de la réaction de la
tige
, à une force =. Dans ces conditions, le mouvement de le long de la tige suit la
loi
= ( étant le temps et une constante positive). ( , ,
) est la base
cylindrique liée à la tige.
N.B : Toutes les expressions vectorielles doivent être exprimées dans la base ( , ,
).
1) Calculer la vitesse
(/) et l’accélération (/) de dans en fonction de , et
.
2) Déterminer (/) le moment cinétique en du point ainsi que sa dérivée par
rapport au temps dans .
3) Déterminer les moments dynamiques de chacune des forces agissant sur le point .
4) En appliquant le théorème du moment cinétique, trouver les expressions des composantes de
.
5) Déterminer (/) l’énergie cinétique du point dans ainsi que sa dérivée par
rapport au temps dans .
6) Déterminer les puissances de chacune des forces agissant sur le point .
7) En appliquant le théorème de l’énergie cinétique, trouver l’expression de .
()
=
g

Exercices et examens résolus: Mécanique du point matériel
M. BOURICH 45
Corrigé
Soit (,) un référentiel orthonormé direct et Galiléen, muni de la base ,,
. Soit
un point matériel de masse . Le point glisse sans frottement le long de la tige () qui
tourne dans le plan horizontal () autour de l’axe () avec une vitesse angulaire
constante (= et > 0). est soumis, en plus de son poids
et de la réaction de la
tige
, à une force =. Dans ces conditions, le mouvement de le long de la tige suit la
loi
= ( étant le temps et une constante positive). ( , ,
) est la base
cylindrique liée à la tige.
N.B : Toutes les expressions vectorielles doivent être exprimées dans la base ( , ,
).
1) Calculer la vitesse
(/) et l’accélération (/) de dans en fonction de , et
.
(/) =
=+
(/) =
(/)
=2+ 2
Déterminer (/) le moment cinétique en du point ainsi que sa dérivée par rapport
au temps dans .
()
=
g
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%