Integrales: Riemann, Simples y Múltiples - Apuntes del Curso
Telechargé par
wassimcasty2003

Cours Math´ematiques 3
Hemici Meriem
23 octobre 2021

Chapitre 1
Int´egrales simples et
multiples
1.1 Rappels sur l’int´egrale de Riemann et sur le
calcul de primitives.
Soit fune fonction d´efinie sur [a, b], tel que pour tout x∈[a, b], f(x)≥0.
1.1.1 Notion de subdivision d’un intervalle ferm´e born´e
[a, b]
Definition 1 On appelle subdivision du segment [a, b], toute famille σ= (x0, x1, ..., xn)
de points de [a, b]telle que :
a=x0< x1< x2< .... < xn−1< xn=b.
Exemple : (1,2,3,4) est une subdivision de [1,4].
Definition 2 On appelle ”pas” de la subdivision σ= (x0, x1, ..., xn), la quantit´e
d´efinie |σ|, donn´ee par :
|σ|=max0≤j≤n−1{xj+1 −xj}.
Exemple : (1,2,7,8,9) est une subdivision de [1,9], avec |σ|= 5.
Definition 3 On dit que la subdivision σ= (x0, x1, ..., xn)est r´eguli`ere si et
seulement si
∀j∈ {0,1, .., n −1}xj+1 −xj=b−a
n.
Dans ce cas, on a : ∀j∈ {0,1, .., n −1}xj=a+jb−a
n.
1

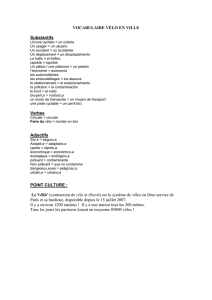
1.1.2 Sommes de Darboux
Soit fune application born´ee d´efinie sur l’intervalle [a, b] et σ= (xi)i=0,..,n
une subdivision de [a, b].
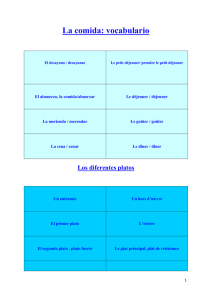
On appelle somme inf´erieure et somme sup´erieure, les quantit´es suivantes :
L(f, σ) = Pi=n−1
i=0 mi(xi+1 −xi) ; U(f, σ) = Pi=n−1
i=0 Mi(xi+1 −xi).
avec : mi=infx∈[xi,xi+1]{f(x)}et Mi=supx∈[xi,xi+1 ]{f(x)}
Figure 1.1 – Somme de Darboux inf´erieure sur [1,2]
Figure 1.2 – Somme de Darboux sup´erieure sur [1,2]

1.1.3 Int´egrale de Riemann
La d´efinition de Darboux est tr`es pr´ecise, mais elle pr´esente un inconv´enient,
`a savoir que la valeur de l’int´egrale donn´ee par Zb
a
f(x) = L = U, n’est pas
toujours facile `a d´eterminer.
D´efinition des sommes de Riemann
Pour d´efinir une somme de Riemann R(f, σ, ε), on a besoin de :
1f, une application born´ee de [a, b] vers R.
2σ= (x0, x1, ..., xn), une subdivision de [a, b].
3ε= (ε0, ε1, ..., εn), famille de points avec ε∈[xj, xj+1].
On a alors R(f, σ, ε) = Pn−1
j=0 f(εj)(xj+1 −xj)
Th´eor`eme 1 : Soit [a, b] un intervalle compact et f∈C0([a, b], R) une fonction
continue. Alors f est int´egrable au sens de Riemann. En outre, on a
limx→+∞b−a
nPn−1
k=0 f(a+kb−a
n) = Zb
a
f(x) dx
Exemple : Calculer les limites des sommes de Riemann suivantes : Pn
k=1
k
n2;
Pn−1
k=0 1
nek
n.
1.1.4 Primitives
Definition 4 Soit f:I∈Rune fonction d´efinie sur un intervalle Iquelconque.
On dit que F:I∈Rest une primitive de fsur Isi Fest une fonction d´erivable
sur Iv´erifiant F0(x) = f(x)pour tout x∈I.
Propri´et´e : Si Fest une primitive de la fonction f, alors l’ensemble des primi-
tives de fest l’ensemble des fonctions de la forme F+ko`u kest un r´eel.
Notation : L’ensemble des primitives d’une fonction f(parfois appel´e int´egrale
non d´efinie de f) est not´e Zf(x) dx
1-Primitives imm´ediates (Primitives des fonctions usuelles) On appelle
primitive imm´ediate (ou primitive des fonctions usuelles) toute primitive
qui d´ecoule des formules de d´erivation de base.

Fonction Primitive Intervalle
xnxn+1
n+1 R
1
xln(|x|) ] − ∞,0[ ou ]0,+∞[
1
xn−1
(n−1)xn−1R+∗ou R−∗
1
√x2√x]0,+∞[
exexR
ezx 1
zezx R
axax
ln(a)R,a > 0 et a6= 1
cosx sinx R
sinx −cosx R
1
cos2(x)= 1 + tan2(x)tan(x) ] −π
2+kπ, π
2+kπ[
−1
sin2(x)=−1−cotan2(x)cotan(x) ]kπ, (k+ 1)π[
tan(x)−ln |cos(x)|]−π
2+kπ, π
2+kπ[
1
sin(x)ln |tan(x
2)|]kπ, (k+ 1)π[
1
cos(x)ln |tan(x
2+π
4)|]−π
2+kπ, π
2+kπ[
1
√1−x2Arcsin(x) ] −1,1[
1
√a2−x2Arcsin(x
a) ] −a, a[
1
1+x2Arctan(x)R
1
a2+x2
1
aArctan(x
a)R
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%