Chapitre V : Mouvement dans un champ de force centrale conservative
Telechargé par
naoufel_khemiri

Chapitre V
N. KHEMIRI-IPEIEM 1
Chapitre V :
Mouvement dans un champ de force centrale
conservative
I. Forces centrales :
1. Définition : Une force centrale
F
r
est une force dont le support (droite d’action)
passe, à tout instant, par un point fixe O dans le référentiel galiléen R. O est appelé le
centre de la force. On dit qu’un point matériel M de masse m est soumis à une force
centrale
F
r
si
F
r
est de la forme
r
F f ( r )u
=
r
r
avec
OM
OM
u
r
=
r
(f(r) ne dépend que de r).
Cette définition implique que
F
r
et
OM
uuuur
sont toujours colinéaires (
F / /OM
uuuur
r
).
Une force centrale conservative dérive d’une énergie potentielle E
p
définie par :
p
r r
dE
F f ( r )u u
dr
= = −
r
r r
L’énergie mécanique d’un point matériel M soumis à une force centrale conservative
est conservée.
Exemples :
a. Interaction coulombienne :
1
r
0
q q
1
F u
4 r²
πε
=
r
r
où
0
ε
est la permittivité électrique du vide. Cette force peut être
attractive ou répulsive selon le signe de qq
1
.
b. Interaction gravitationnelle :
1 1
r r
m m m m
F G u G u
OM ² r²
= − = −
r
r r
où G est la constante de la gravitation
231-11
smkg6,67.10
−−
=G
. La force gravitationnelle est une force centrale attractive qui
régit le mouvement des planètes autour du soleil, le mouvement des satellites autour de
la Terre…
Remarque :
Les forces gravitationnelle et coulombienne sont un type particulier de forces centrales
conservatives appelées forces newtoniennes. Ces forces s’expriment sous la forme
r
k
F u
r²
−
=
r
r
. La force est attractive si
0
>
k
, répulsive si
0
<
k
.
L’énergie potentielle E
p
dont dérive cette force est définie par
p
2 2
dE
k k
dr r r
= − − =
donc
p
k k
E ( r ) cte
r r
− −
= + =
(En général, on choisit la constante nulle pour que l’énergie
potentielle tende vers 0 lorsque la distance r tend vers l’infini). Dans le cas de la force
gravitationnelle
p
GMm
E ( r )
r
−
=
2. Conséquences du caractère central de la force :
Dans ce paragraphe, on montre que le caractère central de la force
F
r
implique la
conservation du moment cinétique en O du système. On en déduit que le mouvement est
plan et vérifie la loi des aires.
a. Conservation du moment cinétique :

Chapitre V
N. KHEMIRI-IPEIEM 2
Le moment cinétique de M par rapport au point fixe O dans le référentiel galiléen R est :
O M / R
L OM mv
= ∧
uuuur
r
r
Si on applique le théorème du moment cinétique dans R :
O
O
( R )
dL
M ( F ) OM F 0
dt
= = ∧ =
r
uuuur
r
r r r
car
F
r
et
OM
uuuur
sont toujours colinéaires. On en déduit que
le moment cinétique est une constante
O
L cste
=
uuuur
r
: On dit que le moment cinétique par
rapport au centre de la force O se conserve au cours du mouvement.
b. Mouvement plan (planéité du mouvement) :
La conséquence immédiate de la conservation du moment cinétique est la nature plane
du mouvement. En effet, le mouvement a lieu dans le plan orthogonal à
O
L
r
et passant par
O car
O
L
r
est constamment orthogonal à
OM
uuuur
et
M / R
v
r
. Le point M est donc astreint à se
déplacer dans le plan formé par O,
OM
uuuur
et
M / R
v
r
.
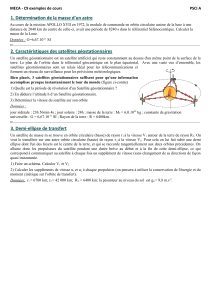
c. Loi des aires :
Comme le mouvement est plan, le système de coordonnées le plus adapté est le système
polaire. On suppose que le mouvement s’effectue dans le plan (XOY) :
r
u
r
θ
u
r
i
r
j
r
k
r
Ainsi, on a
r
OM ru
=
uuuur
r
et
M / R r
v ru r u
θ
θ
= +
r r r
&
&
. Par conséquent,
(
)
O M / R r r
L OM mv ru m ru r u mr² k cte
θ
θ θ
= ∧ = ∧ + = =
uuuur uur
r
r
r r r r
& &
&
d’où
mr² cte
θ
=
&
On introduit et on définit la constante des aires C :
C r²
θ
=
&
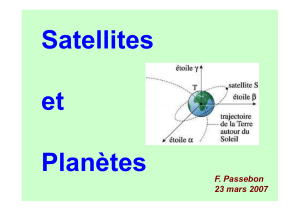
Si on calcule la surface élémentaire dS balayée par le vecteur
OM
uuuur
lorsque θ varie de dθ :
( ) ( )
1 1 1
dS OM M t M t dt OM dOM OM vdt
2 2 2
≈ × + = × = ×
(1/2 rectangle)
1 d 1
dS r² dt Cdt
2 dt 2
θ
= =
ainsi
1
dS Cdt
2
=
: la loi des aires.
i
r
k
r
j
r
)(tM
)( dttM
+
Dans un mouvement à force centrale, le rayon vecteur
OM
uuuur
balaye des aires (surfaces)
égales pendant des intervalles de temps égaux de durée Δt.

Chapitre V
N. KHEMIRI-IPEIEM 3
)( ttM
∆
+
)(tM
)'(' tM
)'(' ttM
∆
+
3. Conservation de l’énergie mécanique :
Si le système (point matériel M) ne subit aucune autre force que la force centrale
conservative
F
r
(
F
r
dérive d’une énergie potentielle E
p
), on a la conservation de l’énergie
mécanique :
2
m p
1
E mv E ( r )
2
= +
II. Interaction gravitationnelle :
On se propose d’étudier le mouvement d’un point matériel M (par exemple la Terre) de
masse m en interaction gravitationnelle avec un astre S (le Soleil) de masse M
S
situé en O
dans le référentiel d’étude supposé galiléen. On se place dans la situation où M
S
≫
m
(l’astre S est fixe et situé en O) et le système (astre S + point M) est isolé (on néglige la
présence des autres astres). Dans ces conditions l’astre S exerce sur le point M une force
d’attraction gravitationnelle :
s
r
M m
F G u
r²
= −
r
r
qui dérive de l’énergie potentielle
s
p
GM m
E ( r )
r
−
=
. Cette force est une force centrale conservative. Le mouvement satisfait
donc aux conservations du moment cinétique et de l’énergie mécanique. Le mouvement
est plan, on l’étudie en coordonnées polaires. Ainsi, on a
r
OM ru
=
uuuur
r
et
M / R r
v ru r u
θ
θ
= +
r r r
&
&
*
(
)
O M / R r r
L OM mv ru m ru r u mr² k mCk cte
θ
θ θ
= ∧ = ∧ + = = =
uuuur uur
r r
r
r r r r
& &
&
*
( )
2 2 2 2 s
m p 0
GM m
1 1
E mv E ( r ) m r r E
2 2 r
θ
= + = + − =
&
&
1. Energie potentielle effective (ou efficace) :
On a
( )
2 2 2 2 s
m p 0
GM m
1 1
E mv E ( r ) m r r E
2 2 r
θ
= + = + − =
&
&
Si on introduit la constante des aires
C r² cte
θ
= =
&
on peut écrire l’énergie mécanique
sous la forme :
2
2s
m2
GM m
1 mC
E mr
2 2r r
= + −
&
Si on pose
( )
2
s
peff 2
GM m
mC
E r
2r r
= −
on aura :
( )
2
m peff
1
E mr E r
2
= +
&
ainsi l’énergie
mécanique ne dépend que de r et sa dérivée
r
&
et le problème se ramène alors à l’étude
d’une seule variable r au lieu de 2 variables.
Discussion :
On pouvait croire que ce problème était à deux degrés de liberté r et
θ
. En fait, à cause
de la conservation du moment cinétique, r et
θ
&
sont reliés par la constante des aires C.
S
2
S
1
S
1
= S
2

Chapitre V
N. KHEMIRI-IPEIEM 4
On a alors intérêt à introduire une énergie potentielle utile, dite Energie potentielle
effective
2
2
2
)()(
r
mC
rErE
PPeff
+=
pour se ramener à un problème à un seul degré de
liberté où seules r et sa dérivée
r
&
interviennent. Cependant, il ne faut pas oublier quand
même que le mouvement de M est plan (M tourne toujours autour de O) et que le
mouvement de M n’est bien sur en aucun cas devenu rectiligne.
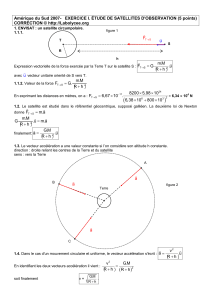
2. Étude qualitative du mouvement radial :
Pour une énergie mécanique E
m
donnée du point matériel M, le tracé de la courbe
représentative de l’énergie potentielle effective E
peff
(r) en fonction de la variable r
permet de conclure graphiquement quant au domaine de variation de r et la nature des
trajectoires de M. En effet, pour avoir un mouvement et les états accessibles, il faut que
E
m
≥ E
peff
.
)(
eff
rU
• Si E
m
< E
0
: Pas de mouvement.
• Si E
m
= E
0
= E
peffmin
: r ne peut prendre que la valeur r
0
: r = r
0
et
2
2
0
C
cste
r
θ
= =
&
: le
mouvement est circulaire uniforme : C’est un état lié.
• Si E
m
= E
1
: r varie dans l’intervalle : r
1
≤ r ≤ r’
1
: C’est un état lié. M reste dans le
puits de potentiel créé par S. La trajectoire est une ellipse dont S est l’un de ses
foyers.
• Si E
m
= 0
: r peut prendre toute valeur comprise entre r
3
et l’infini : C’est un état
de diffusion. M peut atteindre l’infini. La trajectoire est une parabole.
• Si E
m
= E
2
: r peut prendre toute valeur comprise entre r
2
et l’infini : C’est un état
de diffusion. M peut atteindre l’infini. La trajectoire est une hyperbole.
3. Mouvement des planètes – Lois de Kepler :
A partir des observations des planètes faites par Tycho Brahé, Kepler dépouille ces
observations et énonce les lois su mouvement des planètes autour du soleil :
1
ère
loi de Kepler (Loi des orbites 1605) : Les planètes décrivent, dans le sens direct,
des orbites elliptiques dont le soleil occupe l’un des foyers.
2
ème
loi de Kepler (Loi des aires (1604) : Pour chaque planète étudiée, le rayon
vecteur Soleil–Planète balaie des aires égales pendant des intervalles de temps égaux.
3
ème
loi de Kepler (Loi des périodes (1618) : Quelle que soit la planète considérée, le
rapport entre le carré de la période de révolution T de la planète autour du Soleil et le
cube du demi-grand axe a de l'orbite elliptique est le même pour toutes les planètes (ce
rapport est indépendant de la planète) :
2
2 2
Planète
3
Soleil Planète Soleil
4 m
T 4
cte
a GM m GM
ππ
= = =

Chapitre V
N. KHEMIRI-IPEIEM 5
III. Cas d’un mouvement circulaire :
1. Etude du mouvement circulaire :
Dans cette partie, on restreint l’étude faite en II. au cas où la trajectoire de M de masse m
est un cercle de rayon r
0
et de centre O = S (centre de la force centrale conservative). Un
exemple de ce type de mouvement est le mouvement circulaire de rayon r
0
(r
0
est la
distance entre O et M d’où r
0
est la somme du rayon terrestre R
t
et de l’altitude h du
satellite) d’un satellite M de masse m autour de la Terre de masse M
s
et de centre O. Le
mouvement est plan, on l’étudie en coordonnées polaires. Ainsi, on a :
0 r
OM r u
=
uuuur
r
M / R 0
v r u
θ
θ
=
r r
&
2
M / R 0 r 0
r u r u
θ
γ θ θ
= − +
r
r r
& &&
• Expression de la vitesse v de M en fonction de r
0
:
Appliquons le PFD dans le référentiel géostationnaire galiléen :
s
r
2
0
M m
mGu
r
γ
= −
uur
r
or
2
r
0
v dv
u u
r dt
θ
γ
= − +
uur
r r
Si on projette sur
r
u
r
:
2
s
2
0 0
M m
v
m G
r r
− = −
d’où
s
0
GM
v cte
r
= =
Si on projette sur
u
θ
r
:
dv
0
dt
=
ainsi
v cte
=
: On démontre ainsi que la norme de la vitesse est constante et est
égale à
s
0
GM
v cte
r
= =
et par conséquent le mouvement circulaire est uniforme.
• Expression de la période T de M en fonction de r
0
:
La période de révolution T de M autour de O est le temps nécessaire à M pour parcourir
tout le cercle de circonférence 2πr
0
à la vitesse
s
0
GM
v cte
r
= =
. Ainsi,
0
s
0
2 r
T
GM
r
π
=
Par conséquent ;
2 2
3
0 s
T 4
cte
r GM
π
= = : On retrouve ainsi la troisième loi de Kepler.
Remarque : Dans le cas d’une trajectoire elliptique, on remplace le rayon r
0
par le demi-
grand axe a de l’ellipse et on a :
2 2
3
s
T 4
cte
a GM
π
= =
• Expression de l’énergie mécanique de M en fonction de r
0
:
 6
7
6
7
1
/
7
100%