BLUE SERIES
2021
BROCHURE
AVRAMOV
METROLOGY LAB | Bigla 7, 1407 Sofia, Bulgaria | http://www.metrology-lab.solutions

BLUE SERIES
AVRAMOV
1
WHAT IS THE BLUE SERIES DOING?
The Blue Series is a set of different camera systems for measurements and scanning of objects attached to an
industrial robot or a cobot or an underwater robot. The camera delivers measurement data for the observed objects.
Some models are suitable for guiding of the robot in real-time including during welding. Some are suitable for
inspection. Some are used in positioning only.
KNOWING WHEN LASER WELDING SENSORS MAKE SENSE
Since the revolutionary launch of welding robots over 40 years ago, innovation and process improvements have
continued to permeate product development focused on customer needs. In the past, it was easy to program a
robot to turn an arc on and weld a simple yet short seam with many different types of metal joints. However, not
all components are created equal.
Over time, the need arose for smarter machines capable of delivering greater efficiency, fewer errors, less rework,
and lower cycle times. As a result, weld processes and robots have greatly improved, and manufacturing industries
are deploying industrial robots at an exponential rate to reduce operational costs and increase profit margins.
LASER SEAM TRACKING
When the latest technology laser sensors are combined with high-speed controllers, seam and part locations can
be processed in real time. Like through-arc solutions, a dedicated program compensates path and even adapts
welding parameters for seam location and variation.
SkyBlue products reliably track thin gauge metals and allow fast tracking at up to 100 frames per second. This
allows automation in parts that inherently have changing gaps, such as welding around larger cylinders. Like
laser sensing hardware, this also requires a box that may limit the torch access into tight areas of the weldment.
These sensors are also used for weld inspection when coupled with a proper data tracking system. Weld
inspection and traceability is quickly becoming an industry standard for automotive and safety critical welds. Arc
data from the power supply is combined with individual scans of the weld to track each part that comes through
production. Return on investment here comes as a figurative insurance policy that can reduce widespread part
recalls and the weighty liability that comes with any potential part failure.
WHEN DO SENSORS MAKE SENSE?
Sensor technology has come a long way in the recent past, providing game-changing advantages for end users
spanning diverse industries. From industrial welding robots to human- collaborative robots (cobots), sensor
technology improvements are helping companies handle the diversity of applications required, especially where
robotic welding is concerned. Even 3D scanning and modeling sensors that have been developed for inspection
are being researched for one-off weld automated programming to open yet another generation of innovative
solutions.
So, when do sensors make sense? If one has a redundant part with variations that tooling and part consistency,
or design, cannot resolve, there will be a sensor that can. Keeping that in mind, expectations for ROI should be
set with clear-cut goals associated with the investment (reduced waste, improved quality, less down time,
improved production, etc.). While the initial cost of robotic implementation may seem overwhelming to some
manufacturers, understanding the cost savings associated with a long-term approach to automation – and
subsequent technologies, like sensors – is essential.

BLUE SERIES
AVRAMOV
2
Return on investment is usually realized quickly aside from sticker shock and should be discussed in more detail
with an automation integrator. Moreover, education about the different types of sensors (and their capabilities)
available for The Blue Series sensors will make it easier for manufacturers to tackle the most difficult, dangerous,
and dirty tasks, leading to higher production, better quality, and ultimately increased profitability.
LASER TRACKER PROCESSES
In the last 30 years a lot of development and progress has been done in laser scanning technologies related to
robot sensors. From expensive, complex, not reliable, and huge devices laser scanners evolved to useful and
important extension of welding robot systems. Laser tracker sensors are operating in front of the welding torch.
This leads to the fact that measurements are done a bit before the welding tool reach the weld point in the seam.
Because of that the time of collection of the data is very important. It has to be propagated to the robot in a
synchronous manner. Some robots accept a parameter called “aging” and based on that and a proper time
calibration procedure it is possible to evaluate the actual position of the correction being sent to the robot. It is
possible as well to make these computations inside the controller of the camera system and the blue series provide
full possibility for coordinate transformation and configurable time interpolation providing the robot data for
specific robot time.
SEAM FINDING AND POSITIONING
Before starting a welding process usually robot program has an “approaching” stage where the robot is programed
to approach the target workpiece. During that process it is needed to precisely position the workpiece in the robot
case to achieve proper access to the welded joint. This task usually requires a lot of work of the operators or
customization/parametrization of the robot program for each workpiece. A seam finding camera can solve this
problem easily and provide simple positioning information for the robot. The process is fast and provides good
positioning. It is possible to make a fast offline scan of the workpiece and introduce some corrections of the points
in the program.
SEAM TRACKING
Seam tracking delivers significantly more than seam finding. On one site workpieces are not always precisely
machined and a CAD drawing of a workpiece is not enough for programming the robot. Adapting the program for
each workpiece is of course a very undesirable operation. In addition, during welding the workpiece can be distorted
by the welding heat which causes improper weld or even stop of welding. If this is not monitored by an operator the
workpiece must be scrapped in most of the cases. All these cases can be handled by a seam tracking camera. The
seam trackers deliver fast and accurate information to the robot and influence the core robot interpolation cycle
trough specific protocols provided by robot manufacturers. This way the robot program is kept simple, and details
are adjusted with an intelligent measurement procedure built in the software of the camera and the robot.
ADAPTIVE WELDING
The SEAM TRACKING function provide precise positioning data for the robot TCP, but the welding process may be
affected by other parameters as well. The welding gap depending on it’s size may require adaption of speed, the
voltage or the waive in case of waiving welds. The volume of the seam is as well important for detailed optimization
of the quality of the welds. The mismatch when it occurs because of welding heat may require stop of the weld and
adapting of the fixtures. Modern robots provide built in function to support adaptive welding. To do so they need
from the sensor system to provide adequate measurement information for several geometric parameters of the
seam.
QUALITY INSPECTION AND CONTROL

BLUE SERIES
AVRAMOV
3
Quality inspection can be done before or after welding. Before welding it can follow the seam and verify the quality
of the plates or record the track in the robot and use it after in the welding case. After welding the quality inspection
is used to make visual qualification of the final job.
WHAT ARE THE MODELS IN THE BLUE SERIES?
LIGHTBLUE
LightBlue is a laser scanner operating for positioning and pre-scanning of workpieces.
LightBlue is not operating during active welding.
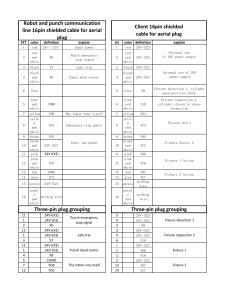
SKYBLUE
SkyBlue is our standard laser scanner. It can be used during welding and provide
measurements for Tracking Point and other geometric parameters usable in adaptive
welding. These camera models support Air Knife for clean view during welding and
protection of
optical parts from smoke and welding
sparks. It has as well a water-cooling
component for protecting the camera of the
welding heat.
SMARTBLUE
SmartBlue is the inspection camera of the Blue series. On top of laser
scanner, it supports ultrasonic transducers to support internal inspection of
the workpiece cracks and problems inside the weld. It can be used during
active welding. By positioning SmartBlue on the backside of the welding
torch one can scan for quality in the same pass after welding.
FAR STD RANGE SKYBLUE SHORT RANGE SKYBLUE

BLUE SERIES
AVRAMOV
4
DEEPBLUE
DeepBlue operates underwater in saline water
and can be used for quality inspection of Ship
Bottoms, Naval constructions, Ship Propeller
quality status. If underwater welding robot is
used it can guide the robot in a similar way like
extra water path correction.
BENEFITS OF DEEPBLUE SYSTEM
- High precision detection of
defects in underwater objects
o ship bottoms without
dry dock use
o cavitation defects or
other problems of ship propellers.
▪ As the price of new propeller of a big ship is high and propeller maintenance is
about 5% of the cost of the propeller (e.g., 500 000$) The maintenance or
replacement must be done only when needed. An underwater evaluation of the
quality of the surface of the propeller could save significant resources to the ship
owner.
▪ Equipping an underwater drone with grinding, polishing tool and DeepBlue
camera system a controlled polishing of the propeller can be achieved.
o Inspection of defects on underwater constructions. Offshore platforms, Port underwater
constructions, other border equipment operating below water level in the see can be
scanned to detect early defects and potential damages leading to bigger problems if not
solved on time.
o Pipeline quality inspection and repair
▪ Pipelines and other infrastructure tubes are produced in segments. The
segments are weld or sealed otherwise, before putting them under water. Once
installed underwater a repair and maintenance of the infrastructure can be done
only underwater using divers or expensive submarines. With DeepBlue mounted
on a drone with appropriate equipment the quality validation, defect evaluation
and eventual repair.
- Control and trajectory correction near surfaces for scanning and of underwater inspection.
o Robot / Drone path correction underwater.
o Underwater path correction during welding.
o Underwater adaptive welding
o Underwater seam inspection
- Scanning of archaeological artefacts with high resolution in gentle conditions to keep the aged
materials (e.g., wood), intact before physical extraction of the pieces for in air examination and
qualification.
WIDEBLUE
WideBlue operate at high distances of 1000 mm, 1500 mm, or 2000 mm from the front of the camera.
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%