Yverdon-les-Bains, le 21 septembre 2011
Département TIN
(Techniques industrielles)
Filières
Microtechnique,
Électronique – Automatisation Industrielle, et
Ingénierie de Gestion
Exercices et corrigés
Motorisation et Commande
des Machines
www.iai.heig-vd.ch
Bernard Schneider
Copyright © Bernard Schneider, 2009-2011

Motorisation et Commande des Machines HEIG-VD
2 Copyright © Bernard Schneider, 2009-2011
L’auteur remercie par avance toutes les personnes qui lui signaleront
des erreurs ou lui proposeront des améliorations.
Copyright © Bernard Schneider, 2009-2011
La copie de ce document, quelle qu’en soit la forme et le support, n’est pas autorisée sans l’accord formel de l’auteur. Par ailleurs,
celui-ci ne prend aucune responsabilité relative à des erreurs éventuelles du contenu, ni aux droits de reproduction de certaines des
images utilisées.
Toutes propositions d’améliorations et de corrections seront les bienvenues.

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 3
Table des matières
Chapitre 1 Réducteurs et cinématique .......................................................................................................... 5
1.1 Étude d’un déplacement ..................................................................................................................... 5
1.2 Rapport de réduction .......................................................................................................................... 6
1.3 Réducteur pour l’entraînement de papier ........................................................................................... 7
1.4 Question de quadrants ........................................................................................................................ 7
1.5 Calcul d’un réducteur pour bande transporteuse ................................................................................ 8
1.6 Charge d’un moteur avec crémaillère ................................................................................................. 9
1.7 Rapport de réduction optimal ........................................................................................................... 10
Chapitre 2 Moteur DC ................................................................................................................................ 13
2.1 Vitesse d’un moteur DC à vide et en charge .................................................................................... 13
2.2 Caractérisation d’un moteur DC par 2 essais ................................................................................... 14
2.3 Rendement d’un moteur DC ............................................................................................................. 15
2.4 Allure du courant dans un moteur DC bloqué .................................................................................. 16
2.5 Vitesse et courant d’un petit moteur DC .......................................................................................... 20
2.6 Freinage d’urgence d’un moteur DC ................................................................................................ 22
Chapitre 3 Moteur synchrone ..................................................................................................................... 24
3.1 Moteur synchrone alimenté à fréquence constante........................................................................... 24
3.2 Moteur synchrone en régime nominal .............................................................................................. 24
3.3 Accélération d’un servomoteur « brushless » .................................................................................. 25
Chapitre 4 Moteur asynchrone ................................................................................................................... 26
4.1 Pôles et glissement d’un moteur asynchrone .................................................................................... 26
4.2 Couple et vitesse d’un moteur asynchrone ....................................................................................... 26
4.3 Moteur asynchrone utilisé à charge réduite ...................................................................................... 27
4.4 Moteur asynchrone en régime de freinage ....................................................................................... 28
4.5 Moteur asynchrone à 50 Hz et à 60 Hz ............................................................................................ 29
4.6 Microcentrale hydraulique ............................................................................................................... 30
4.7 Moteur asynchrone entraînant une pompe ....................................................................................... 31
4.8 Système de bobinage ........................................................................................................................ 32
Chapitre 5 Choix d’un entraînement .......................................................................................................... 36
5.1 Table tournante ................................................................................................................................. 36
5.2 Dimensionnement thermique d’un servomoteur .............................................................................. 37
5.3 Validation thermique pour un moteur .............................................................................................. 39
5.4 Calcul de productivité ...................................................................................................................... 40
5.5 Entraînement d’une tourelle ............................................................................................................. 41

Motorisation et Commande des Machines HEIG-VD
4 Copyright © Bernard Schneider, 2009-2011
5.6 Entraînement pour découpe de papier ............................................................................................. 43
5.7 Calcul d’une crémaillère pour moteur pas-à-pas ............................................................................. 47
Chapitre 6 Considérations d’énergie et de puissance ................................................................................ 49
6.1 Puissance d’alimentation et résistance de freinage .......................................................................... 49
6.2 Calcul de la résistance de freinage ................................................................................................... 50
Chapitre 7 Profils de mouvements ............................................................................................................ 54
7.1 Déplacement optimal avec profil vitesse triangulaire ...................................................................... 54
7.2 Déplacement optimal avec profil vitesse trapézoïdal ...................................................................... 55
7.3 Calcul du polynôme 3-4-5 – transition arrêt arrêt ....................................................................... 58
7.4 Calcul du polynôme 3-4-5 – transition arrêt vitesse fixe ............................................................ 63
7.5 Déplacement avec profil en polynôme 3-4-5 ................................................................................... 65
7.6 Déchargeur de cartons ..................................................................................................................... 66
7.7 Influence du profil de mouvement sur le choix d’un moteur .......................................................... 69
7.8 Influence du profil de mouvement sur l’échauffement d’un moteur ............................................... 70
Chapitre 8 Mouvements multiaxes ............................................................................................................ 73
8.1 Presse à découper une bande ........................................................................................................... 73
8.2 Presse à découper une bande – cadence plus lente .......................................................................... 75
8.3 Presse à découper une bande – bande moins épaisse ....................................................................... 76
8.4 Découpe de carton ........................................................................................................................... 77
8.5 Poinçonneuse à 2 axes ..................................................................................................................... 80
8.6 Découpeuse Laser à 2 axes .............................................................................................................. 81
8.7 Synchronisation d’un esclave sur un maître « réel » ....................................................................... 83
8.8 Synchronisation d’un esclave sur un maître « virtuel » ................................................................... 84
8.9 Couteau volant ................................................................................................................................. 84
8.10 Mise en phase d’un axe esclave sur un maître ................................................................................. 87

HEIG-VD Motorisation et Commande des Machines
Copyright © Bernard Schneider, 2009-11 5
Chapitre 1 Réducteurs et cinématique
1.1 Étude d’un déplacement
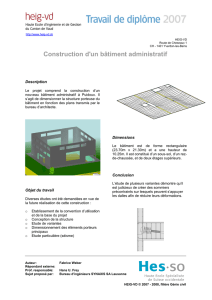
Une machine doit souder des écrous (inserts) à la distance D les uns des autres, sur une bande métallique qui
défile à vitesse constante V.
V
D
vdispo soudure (t)
Pour chaque écrou, le dispositif de soudure accélère pour être synchrone avec la bande, reste à cette vitesse
pendant la durée tsoudure (durée de la soudure), puis s’arrête. La valeur de l’accélération est A.
Le dispositif de soudure retourne alors à son point de départ, avec un profil de vitesse triangulaire, caractéri-
sé par la même accélération A.
Valeurs numériques :
2
soudure m/s24 ; ms 75 ; cm 12 ; m/s 5,0 AtDV
a) De quelle distance se déplace le dispositif de soudure pendant chacun de ses déplacements aller, à
profil de vitesse trapézoïdal ?
b) Quelle est la durée du mouvement de retour, à profil de vitesse triangulaire ?
c) Quelle vitesse max. Vretour atteint-il pendant ce retour ?
d) Quel est le temps disponible pour la saisie de l’écrou suivant, entre le retour à la position initiale et le
départ du nouveau cycle ?
Réponse – a
Le profil de vitesse au cours du temps est le suivant :
t
V
tsoudure
tcycle
0
Vretour
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
1
/
88
100%