Les diagrammes de Bode – Applications au filtrage
Les diagrammes de Bode sont les graphes représentant la réponse en fréquence d’un système.
Ils sont au nombre de deux :
• Un diagramme en gain, qui va permettre d’apprécier l’atténuation ou l’amplification
en fonction de la fréquence du signal d’entrée
• Un diagramme en phase qui va permettre d’apprécier le retard introduit par le système
entre la tension de sortie et la tension d’entrée pour toutes les pulsations le constituant.
I- Les échelles
a) L’échelle des abscisses :
L’électronique utilise des signaux dans une gamme de fréquences très vaste :
• de 1 Hz à 1000Hz on retrouve l’électronique associée aux commandes d’objets
mécaniques (alimentés par le réseau EDF par exemple)
• de 20 Hz à 20 kHz on retrouve l’électronique pour l’audio
• de 100 kHz à 1 MHz, l’électronique pour les modulations AM
• de 10 à 500 MHz, l’électronique pour les modulations FM
• 700 MHz à 900 MHz, la bande de fréquence utilisée par les téléphones portables
• Vers 10 GHz à 12 GHz, la télévision par satellite
Si on cherche à connaître la réponse d’un système pour toutes ces fréquences, on comprend
alors qu’une échelle graduée linéairement ne peut donner satisfaction (manque de place…).
On utilise alors une échelle logarithmique qui va permettre d’apprécier la réponse d’un
système pour une gamme de fréquences importante sur un graphe de dimension raisonnable.
A noter qu’en générale on note sur les diagrammes de Bode la valeur des fréquences fet non
pas la valeur de )( fLog . Cela permet de faire une lecture directe et de connaître le
comportement du système pour des fréquences données.
Donc dans un diagramme de Bode, l’échelle des abscisses est )( fLogx a
1 10 102 103 104 105 106 107 f(Hz)
0 1 2 3 4 5 6 7 Log(f)
Printed with FinePrint - purchase at www.fineprint.com
PDF created with pdfFactory trial version www.pdffactory.com

- A noter que l’on définit une octave comme le passage d’une fréquence 0
f à une fréquence
20
f
- A noter que l’on définit une décade comme le passage d’une fréquence 0
f à une fréquence
10 0
f
b) L’échelle des ordonnées :
De nombreux systèmes sont modélisables par un signal en entrée qui, après traitement, fournit
un signal en sortie. Soit )(),( tPtv ee , la tension et la puissance associées au signal d’entrée et
)(),( tPtv ss la tension et la puissance associées au signal de sortie.
)(),( tPtv ee )(),( tPtv ss
Comme on l’a vu, tout signal est décomposable en une somme de sinusoïdes. Le but du
diagramme de Bode est de donner le devenir de chaque sinusoïdes (donc le devenir du signal
total). Au final, on considère une pulsation quelconque du signal d’entrée et on utilise la
notation complexe associée aux signaux d’entrée et de sortie.
)(),( tPtv e
e )(),( tPtv s
s
i) diagramme en gain :
Le diagramme de Bode en Gain rend compte du devenir de l’amplitude de chacune des
harmoniques. Un rapport intéressant est )(
)(
tP
tP
e
s. Cependant ce rapport peut également évoluer
entre des valeurs importantes (c’est le cas d’amplification) et des valeurs faibles (c’est le cas
lors d’atténuation). Donc là encore on va utiliser une échelle logarithmique pour apprécier
correctement toute l’action du système. On définit alors la fonction gain, notée G, d’un
système par :
=)(
)(
10 tP
tP
LogG e
s
Donc dans le cas d’un diagramme de Bode en gain, l’échelle des ordonnées
est :
)(
)(
10 tP
tP
Logy e
s
a
Système
∑
Système
∑
Printed with FinePrint - purchase at www.fineprint.com
PDF created with pdfFactory trial version www.pdffactory.com

Dès lors, on comprend qu’il est utile de repérer la fréquence pour laquelle on perd la moitié de
l’énergie injectée en entrée. Cette fréquence est la fréquence de coupure à -3dB
On utilise souvent une autre définition (équivalente) de la fonction Gain en utilisant la
fonction de transfert )(
)(
tv
tv
Te
s
=:
La définition de la fonction de transfert étant )(
)(
tv
tv
Te
s
=, on définit également la fonction
gain comme )(20)(20)(20 eeff
seff
em
sm v
v
Log
v
v
LogTLogG ===
Avec )(
)( s
tj
sm
sevtv ϕω +
=et )(
)( s
tj
em
eevtv ϕω +
=et 2
sm
seff v
v=et 2
em
eeff v
v=
Donc dans le cas d’un diagramme de Bode en gain, l’échelle des ordonnées
est :
)(
)(
20 tv
tv
Logy e
s
a
- Si on obtient un gain d’équation : CtefLogfG += )(20)( alors :
dBLog
f
f
LogfGfG
fLogfLogCtefLogCtefLogfGfGoùd
CtefLogfG
CtefLogfG
6)2(20
2
20)()2(
)(20)2(20)(20)2(20)()2(:'
)2(20)2(
)(20)(
0
0
00
000000
00
00
==
=−
−=−−+=−
+= +=
Ce type de relation conduit à une variation de 6dB par octave
Si c
fest la fréquence pour laquelle la puissance en sortie vaut
2
e
Palors le gain est donné
par:
dBLogLog
PE
P
LogG e
e3)2(10)
2
1
(10(10 −=−=== . Une atténuation de -3dB du signal d’entrée
correspond à une perte de la moitié de l’énergie. La fréquence de coupure définit une bande
de fréquences appelée bande passante dans laquelle les fréquences sont transmises « sans
trop d’atténuation ».
En effet, si on considère que les signaux d’entrée et de sortie arrivent sur une résistance R
alors :
R
tv
tPet
R
tv
tP s
s
e
e)(
)(
)(
)( 22 ==
Donc la fonction gain peut s’écrire :
T
tv
tv
Log
tv
tv
Log
R
tv R
tv
Log
tP
tP
LogG s
s
e
s
e
s
e
slog20
)(
)(
20
)(
)(
10
)(
)(
10
)(
)(
10 2
2
2
2
=
==
==
Printed with FinePrint - purchase at www.fineprint.com
PDF created with pdfFactory trial version www.pdffactory.com

- Si on obtient un gain d’équation : CtefLogfG += )(20)( alors :
dBLog
f
f
LogfGfG
fLogfLogCtefLogCtefLogfGfGoùd
CtefLogfG
CtefLogfG
20)10(20
10
20)()2(
)(20)10(20)(20)10(20)()2(:'
)10(20)10(
)(20)(
0
0
00
000000
00
00
==
=−
−=−−+=−
+= +=
Ce type de relation conduit à une variation de 20dB par décade
- Si on obtient un gain d’équation : CtefLogfG += )(40)( alors :
dBLog
f
f
LogfGfG
fLogfLogCtefLogCtefLogfGfGoùd
CtefLogfG
CtefLogfG
12)2(40
2
40)()2(
)(40)2(40)(40)2(40)()2(:'
)2(40)2(
)(40)(
0
0
00
000000
00
00
==
=−
−=−−+=−
+= +=
Ce type de relation conduit à une variation de 12dB par octave
- Si on obtient un gain d’équation : CtefLogfG += )(40)( alors :
dBLog
f
f
LogfGfG
fLogfLogCtefLogCtefLogfGfGoùd
CtefLogfG
CtefLogfG
40)10(40
10
40)()2(
)(40)10(40)(40)10(40)()2(:'
)2(40)10(
)(40)(
0
0
00
000000
00
00
==
=−
−=−−+=−
+= +=
Ce type de relation conduit à une variation de 40dB par décade
ii) Diagramme en phase
Le diagramme en phase va permettre d’apprécier le retard introduit par le système lors du
traitement du signal d’entrée. Cette étude effectuée pour toutes les fréquences nous permet
d’apprécier une déformation éventuelle du signal traité.
Avec )(
)( s
tj
sm
sevtv ϕω +
=et )(
)( s
tj
em
eevtv ϕω +
=, le déphasage est donné par:
eses
e
stt
v
v
ArgTArg ϕϕϕωϕω −=+−+== )()()()(
Donc dans les diagrammes de Bode en phase, l’échelle des ordonnées est : )(TArgy a
Printed with FinePrint - purchase at www.fineprint.com
PDF created with pdfFactory trial version www.pdffactory.com

II- Tracés des diagrammes de Bode
On essaye toujours d’écrire les fonctions de transfert en introduisant une ou des pulsations de
référence afin de pouvoir les écrire avec des termes en 0
ωωj(où
ω
est une pulsation quelconque
de travail et 0
ω une pulsation de référence fixée par les composants du système).
Ensuite on cherche à remplir le tableau suivant :
0
ωω << 0
ωω >> 0
ωω =
e
s
v
v
T=
TLogG 20=
Arg )(T
Les deux premières colonnes permettent de tracer le comportement asymptotique du système
(c’est-à-dire « loin » de la pulsation 0
ω), la troisième permet d’esquisser le diagramme réel
(c’est-à-dire « au voisinage » de 0
ω).
Nous allons voir que les tracées des diagrammes de Bode se ramènent toujours à des fonctions
de transfert simples. Il faut bien avoir à l’esprit que :
)(20
)()(
TArgouTLogy
fLogouLogx
a
aω
Les diagrammes de Bode se ramèneront donc souvent à des équations du type :
baxybfaLogG +=⇔+= )(
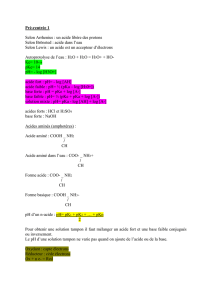
a) Cas simples :
On se ramènera souvent aux fonctions de transfert simplifiées suivantes :
T )(20 TLogG = Arg
(
)
T
0
ωωj
Le gain est donné par :
(
)
)(2020 0
ωω LogLogG −=
G
ω
ω0
pente : +20dB/decade ou
+6dB /octave
La phase vaut 2
π
Arg
(
)
T
2
π
ω
Printed with FinePrint - purchase at www.fineprint.com
PDF created with pdfFactory trial version www.pdffactory.com
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%