4-TP_Algorithmique
.docx
1/5
Séquence 5a
Développement informatique
Algorithmique
Niveau : 1
ère
SI
Objectifs de l’activité :
- Etablir le programme permettant de commander le moteur de propulsion d’un robot,
- Simuler son fonctionnement,
- Valider son fonctionnement réel et simulé.
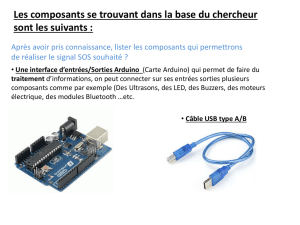
1. Présentation d’ARDUINO
ARDUINO est une plateforme matérielle et logicielle de développement d'applications embarquées.
Côté matériel, elle se compose d'une carte électronique basée autour d’un microcontrôleur comportant un certain nombre
d’entrées et de sorties (les ports) permettant la connexion de capteurs, ou d’actionneurs.
Le logiciel de programmation des modules ARDUINO est une application Java, libre et multi- plateformes, servant
d’éditeur de code et de compilateur, et qui peut transférer le programme au travers de la liaison USB.
Voir documentation annexe : Didacticiel Arduino
2. Présentation de PROTEUS
PROTEUS est une suite logicielle permettant la CAO électronique.
Proteus est composé de deux logiciels principaux : ISIS, permettant entre autres la création et la modélisation de schémas
électrique, et ARES, destiné à la création de circuits imprimés.
Voir documentation annexe : Didacticiel Proteus
Réaliser un programme
«
Arduino
»
pour un produit
Modéliser et valider le fonctionnement du produit sous « Proteus »
Valider le fonctionnement réel du produit
Activités pratiques

4-TP_Algorithmique
.docx
3. Travail demandé
3.1 –
Prise en main des logiciels
L’objectif
est la prise en main des deux logiciels utilisés
3.1.1 Saisie du programme
-
Ce programme doit permettre de faire clignoter une LED connectée sur la broche n°10 de la
carte Arduino. Elle doit rester allumée pendant
Le programme est le suivant :
Lancer le logiciel ARDUINO,
Éditer le programme,
Compiler le programme,
Cliquer sur « Croquis
» puis «
côté du fichier ″.ino″
du programme
3.1.2 Simulation
du programme
Lancer le logiciel PROTEUS,
Ouvrir le fichier ″
LED_Clignotante_Incomplet
Compléter le modèle,
Cliquer
sur le microcontrôleur puis
À la ligne « Program File »
, clique
aller chercher le fichier ″.hex″
. Clique
Simuler et valider le
fonctionnement
Prise en main des logiciels
est la prise en main des deux logiciels utilisés
: Arduino et Proteus.
3.1.1 Saisie du programme
Ce programme doit permettre de faire clignoter une LED connectée sur la broche n°10 de la
carte Arduino. Elle doit rester allumée pendant
3
s et éteinte pendant 1 s.
» puis «
Exporter les binaires compilées
» (Un fichier
du programme
.
du programme
LED_Clignotante_Incomplet
″,
sur le microcontrôleur puis
« Edit properties ».
, clique
r sur le petit dossier et
. Clique
r sur OK.
fonctionnement
.
2/5
Ce programme doit permettre de faire clignoter une LED connectée sur la broche n°10 de la
s et éteinte pendant 1 s.
» (Un fichier
″.hex″ doit se créer à

4-TP_Algorithmique
.docx
3/5
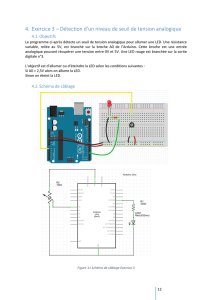
3.1.3 Mise en œuvre
Pour tester le fonctionnement, vous disposez du matériel suivant :
Une carte Arduino, une platine enfichable, une LED, une résistance, des fils de connexions et un câble
de téléversement PC-CARTE sont nécessaires.
Réaliser le câblage,
Valider le fonctionnement.
Pour toutes les activités suivantes, vous suivrez la procédure utilisée précédemment :
Edition du programme, Validation sous PROTEUS,
Câblage de la carte ARDUINO une fois la simulation validée.
3.2 – Commande d’une LED
- Ce programme doit permettre d’allumer une LED connectée sur la broche N°2 lorsqu’un
interrupteur, connecté sur la broche numérique N°1, est actionné.
Editer le programme sous ARDUINO, puis le compiler.
Compléter le modèle (fichier ″ LED_Commandee_Incomplet ″) sous PROTEUS.
Simuler et valider le programme.
Réaliser le câblage avec le matériel à votre disposition,
Valider le fonctionnement.

4-TP_Algorithmique
.docx
4/5
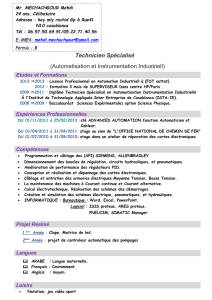
3.3 – Commande d’un moteur
- L’objectif est de commander un moteur (par exemple le moteur de propulsion d’un robot) par
l’intermédiaire d’un interrupteur.
On donne ci-dessous le schéma de connexion des différents éléments :
Nota : Un relais électromécanique est un interrupteur commandé électriquement. Il contient une
bobine qui, lorsqu’elle est alimentée, déplace des contacts mobiles sous l’effet d’un champ magnétique
induit.
Editer le programme sous ARDUINO, puis le compiler.
Compléter le modèle (fichier ″ Commande_Moteur_Incomplet ″) sous PROTEUS.
Simuler et valider le programme.
Réaliser le câblage avec le matériel à votre disposition,
Valider le fonctionnement.

4-TP_Algorithmique
.docx
5/5
3.4 – Commande d’un moteur – 2 sens de rotation
- L’objectif est de commander un moteur dans les deux sens de rotation par l’intermédiaire de
deux interrupteurs.
Editer le programme sous ARDUINO, puis le compiler.
Saisir le modèle sous PROTEUS.
Simuler et valider le programme.
Réaliser le câblage avec le matériel à votre disposition,
Valider le fonctionnement.
1
/
5
100%