Schéma électrique 1. Objectif du TP 2. Notions d'interface de puissance

Classe de première STI2D
Schéma électrique
1. Objectif du TP
Étude et réalisation d'une interface de puissance.
2. Notions d'interface de puissance
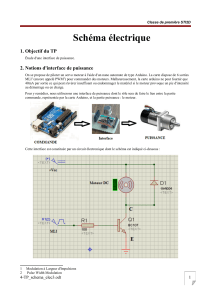
On se propose de piloter un servo moteur à l'aide d'un nano automate de type Arduino. La carte dispose de 6 sorties
MLI1 (encore appelé PWM2) pour commander des moteurs. Malheureusement, la carte arduino ne peut fournir que
20mA par sortie ce qui peut s'avérer insuffisant ou endommager le matériel si le moteur provoque un pic d'intensité
au démarrage ou en charge.
Pour y remédier, nous utiliserons une interface de puissance dont le rôle sera de faire le lien entre la partie
commande, représentée par la carte Arduino, et la partie puissance : le moteur.
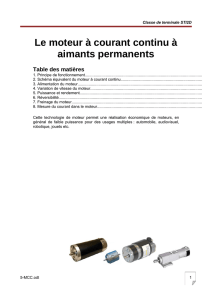
Cette interface est constituée par un circuit électronique dont le schéma est indiqué ci-dessous :
1 Modulation à Largeur d'Impulsions
2 Pulse Width Modulation
4-TP_schema_elec.odt 1

Classe de première STI2D
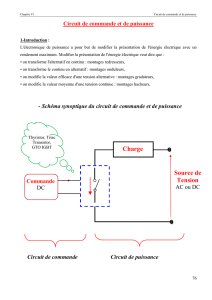
3. Étude de l'interface
Manipulation : Réaliser le montage électrique sous ISIS Proteus à partir du schéma ci-dessus.
Régler le tension d'alimentation du moteur à …....... V.
Régler le générateur d'impulsion (pulse) à une fréquence de …...... Hz avec une
tension d'impulsion (Pulsed high voltage) à 5V.
Placer des multimètres pour mesurer la tension aux bornes du moteur et l'intensité qui
le traverse.
Placer un ampèremètre pour mesurer le courant qui circule dans la résistance.
Placer un oscilloscope pour visualiser le signal MLI.
Lancer la simulation.
Compléter le tableau suivant :
Largeur
impulsion
Intensité résistance
(mA)
Intensité moteur
(mA)
Tension moteur
(V)
Moteur
(tr/s)
100 %
80 % X X X
50 % X X X
20 % X X X
Indiquer comment varie le signal MLI en fonction de la largeur d'impulsion :
…...........................................................................................................................................................................
Conclure :
…...........................................................................................................................................................................
Le composant BC107 est un transistor bipolaire NPN dont le symbole électrique est représenté
ci-contre.
Ce dispositif électronique à base de semi-conducteur permet, à partir d'un faible courant sur sa
base (B) de « commander » un courant beaucoup plus important entre le collecteur (C) et
l'émetteur (E), suivant le principe de l'amplification de courant.
1. Régler la tension d'impulsion à 0V.
2. Relancer la simulation.
Conclure :
…...........................................................................................................................................................................
Dans un circuit électronique, un transistor remplace (cocher la ou les bonnes réponses) :
une lampe un interrupteur une LED une inductance
4. Réalisation du circuit
Circuit final Implantation des composants Vue de dessous
4-TP_schema_elec.odt 2

Classe de première STI2D
Schéma de câblage :
Dessus Dessous
1. Commencer par souder les straps.
2. Souder les supports tulipe du transistor.
3. Souder la diode puis la résistance.
4. Souder les broches.
5. Retourner la plaque et souder les straps comme indiqué sur la figure ci-dessus.
6. Positionner le transistor en respectant son sens (voir ci-contre).
5. Test du circuit
Connecter l'interface à la carte Arduino et au
servomoteur en respectant les branchements comme
indiqué ci-dessous.
Côté servomoteur Côté Arduino
Si l'interface a été correctement réalisée, le moteur doit tourner à
une certaine vitesse ou s'arrêter selon le signal PWM appliqué sur
la broche.
4-TP_schema_elec.odt 3
1
/
3
100%