Application 1 :
Mesure d’un coefficient de viscosité par les oscillations d’un système masse-ressort
On se propose de déterminer la valeur du coefficient de viscosité d'un liquide. On étudie pour
cela le mouvement oscillatoire amorti d'une bille accrochée à un ressort
1. On réalise d’abord l’expérience dans l’air où les frottements fluides sont
négligeables. On suspend alors une sphère, de rayon , de masse
volumique et de masse , à un ressort de raideur et de longueur à
vide et dont l’autre extrémité est attachée à un support fixe. A l’équilibre
du système, la longueur du ressort est .
a. Établir l'expression de l'allongement du ressort à l'équilibre en fonction
des paramètres caractérisant le système. Calculer sa valeur avec les
données suivantes :
, ,
b. On écarte, verticalement, la sphère de sa position d'équilibre de et on la
lâche sans vitesse initiale . En utilisant une approche énergétique, établir
l’équation différentielle du mouvement.
c. En déduire les expressions de la pulsation propre et de la période propre . Calculer
la valeur numérique de .
2. On réalise maintenant l'expérience en plongeant la sphère dans de l'huile,
de viscosité et masse volumique kg.m.
En mouvement, la sphère est soumise à une force de frottement fluide dont
l’expression est donnée par la formule de Stokes :
où est la vitesse verticale de la sphère.
a. L'allongement du ressort dans la nouvelle position d'équilibre est-il
identique à celui de la question 1.a) ? Justifier votre réponse. Donner sa
valeur numérique.
b. On écarte à nouveau la sphère de sa position d'équilibre d’une distance
et on la lâche sans vitesse initiale . Etablir l’équation
différentielle du mouvement. En posant
, donner l’expression de en fonction
de et
c. Une étude expérimentale a montré que le mouvement de la sphère est pseudo-périodique
de pseudo-période T et que le décrément logarithmique est Déterminer les
expressions de :
- en fonction de et de ,
- en fonction de et ,
- en fonction de .
d. À partir des données du problème, déterminer la viscosité de l’huile.

Exercice 2
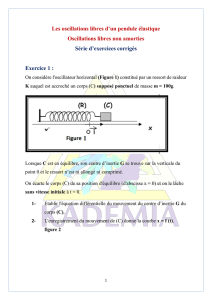
Un oscillateur mécanique est constitué d’un ressort de masse négligeable de constante de
raideur k et un petit corps (C) de masse m.
Une extrémité du ressort est fixée à un rail incliné d’un angle α par rapport à l’horizontal et
à l’autre on suspend le corps (C). Celui-ci peut glisser sans frottement sur le rail. On associe à
celui-ci un axe (O, x) orienté vers le bas et dont l’origine O coïncide avec la position de (C) à
l’équilibre.
La force de frottement qu’exerce l’air sur le mobile (C) est équivalente à une action de la
forme
vhf
ou h une constante strictement positive et
v
le vecteur vitesse instantanée du
mobile. On écarte le mobile d’une distance d vers le bas et on le libère sans vitesse initiale.
1. Établir l’équation différentielle que vérifie x et la mettre sou la forme :
2
000
w
x x wx
Q
Q et w0 des constantes positive dont on donnera l’expression en fonction de
m, k et h.
2. On suppose que Q =1 (régime pseudopériodique). Etablir l’équation horaire du
mouvement x(t) dans ce cas, en fonction de d et w0. En déduire la valeur du décrement
logarithmique δ.
3. Montrer qu’avec un choix judicieux de l’état de référence, l’énergie potentielle totale
peut se mettre sous la forme
2
1
2
p
E kx
et l’énergie cinétique peut se mettre sous la forme
2
.
2
1xmEc
.
4. Exprimer l’énergie mécanique initiale du systéme Em, ainsi que l’energie dissipée à la
fin de la 1ére pseudo-période Em, en fonction de d et de k. En déduire, le pourcentage
d’énergie mécanique dissipée après chaque période.

Exercice 3
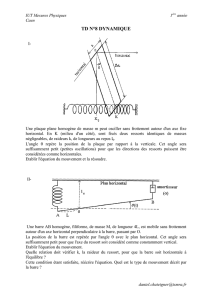
En utilisant un modèle à un degré de liberté, on étudie les vibrations d’une machine
industrielle. La machine en question, de masse , est montée sur une dalle rigide par
l’intermédiaire d’un plot de caoutchouc. Le plot est modélisé par un système mécanique
vibratoire à un degré de liberté (figure 3), composé d’un ressort de raideur en parallèle
avec un amortisseur de constante c. La position, la vitesse et l’accélération de la machine
sont notées respectivement par, et et relativement à la position
d’équilibre statique. Lorsque la machine ne fonctionne pas, le plot présente un
écrasement sous la masse de la machine sous la masse de la machine.
Données numériques :
- Masse de la machine : ; Accélération de la pesanteur : .
- Le raccourcissement est :
1. Montrer que l’équation différentielle du mouvement s’écrit : .
2. Calculer les valeurs de la raideur du ressort , la pulsation propre du système
(machine, plot).
3. En négligeant l’amortissement, à l’instant initial, la machine est déplacée à la position
et libérée ensuite avec une vitesse .
a. Exprimer la position , la vitesse et l’accélération.
b. En traçant le diagramme de Fresnel (faire une figure), mettre la position sous la
forme : en précisant les expressions de et en fonction de
, et . Calculer et .
Dans la suite, l’amortissement n’est plus négligeable. Il est prévu alors que l’amplitude
du mouvement de la machine de la dixième oscillation soit 10% de celle de la
première oscillation .
4. Calculer le décrément logarithmique .
5. Calculer la constante
en montrant la relation
.
6. En déduire la constante d’amortissement c.
7. Afin que le régime d’amortissement soit apériodique et réduit plus rapidement
possible le déplacement à zéro, déterminer la raideur puis en maintenant et
constantes.
8. Dans les conditions du régime critique, exprimer telles que sans
vitesse initiale.

Correction
Exercice 1
1-
a- Système : sphère de masse
.
Bilan des forces :
et
À l'équilibre : on a
,
En projetant selon (OX) : .
Donc l'allongement du ressort à l'équilibre est :
=
.
b- Le poids et la tension du ressort sont des forces conservatives ; Le système est
donc conservatif et l'énergie mécanique se conserve.
La résultante des forces appliquée à l’instant t est :
=
, (compte tenu de la condition d’équilibre).
=
Donc : =
+
c- La pulsation propre
et de la période propre
Équation horaire x(t) du mouvement est :

2-
a- Bilan de forces appliquées :
- Cette bille est soumise à :
- Son poids :
- La poussée d’Archimède :
- L’effet de la viscosité du fluide représentés par une force de frottement fluide :
- La tension ressort :
Appliquons la P.F.D :
En projetant cette équation sur l’axe (OX), équation d’évolution de la bille est alors :
(1)
À l’équilibre, nous avons :
L’allongement n’est plus le même à cause de l’existence de la poussée d’Archimède.
b- La longueur du ressort à l’instant t est :
En remplaçant dans (1) et en tenant compte de la condition d’équilibre on aura :
Avec : -
La pulsation propre de l’oscillateur ;
-
: le facteur de qualité.
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%