Doc. Ressources - Transmission puissance Page 1 sur 23
.
.
.
Compétence(s) :
Analyser,
Identifier les caractéristiques d’un transmetteur de puissance,
Identifier les domaines d’application,
Analyser une solution constructive.
1
1.
.
I
In
nt
tr
ro
od
du
uc
ct
ti
io
on
n
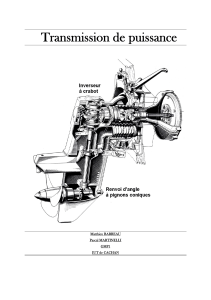
Une chaîne d’action d’un système mécanique vise à transformer une énergie disponible pour créer un mouvement ou
un effort. L’énergie mécanique à la sortie de l’actionneur devra être adaptée et transmise à l’effecteur afin
d’obtenir l’effet attendu.
L’analyse et l’étude des transmetteurs de puissance est implicitement liés à la fonction générique Transmettre de
la chaîne d’énergie.
Ce document est une synthèse non exhaustive des différentes solutions technologiques permettant de transmettre
et adapter de l’énergie mécanique. Les différents aspects abordés concerneront essentiellement :
- Les arbres et accouplements,
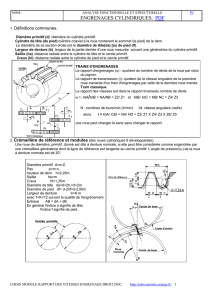
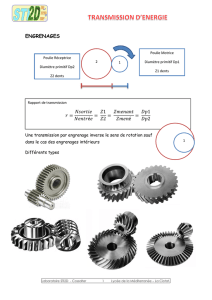
- Les engrenages,
- Les réducteurs et Multiplicateurs,
- Les mécanismes vis – écrou,
- Les liens flexibles,
- Les mécanismes plans à barres.
2
2.
.
A
Ar
rb
br
re
es
s
e
et
t
a
ac
cc
co
ou
up
pl
le
em
me
en
nt
ts
s
2.1. Arbres et axes - Définitions
Les arbres sont des pièces mécaniques, de section généralement circulaire.
On distingue principalement deux familles d’arbres :
- ceux qui transmettent un couple entre les éléments de transmission qu’ils supportent : poulies, pignons,
joints d’accouplement, … ;
- ceux qui ne transmettent pas de couple, on les appelle alors des axes, ils servent de support d’organes
mécaniques ou bien d’axes d’articulation.
CPGE
-
PTSI
-
Ch. Coeffin
Sciences Industrielles de l’ingénieur
F
F
F
i
i
i
c
c
c
h
h
h
e
e
e
s
s
s
R
R
R
e
e
e
s
s
s
s
s
s
o
o
o
u
u
u
r
r
r
c
c
c
e
e
e
s
s
s
C
C
C
I
I
I
.
.
.
1
1
1
.
.
.
A
A
A
p
p
p
p
p
p
r
r
r
o
o
o
c
c
c
h
h
h
e
e
e
p
p
p
l
l
l
u
u
u
r
r
r
i
i
i
-
-
-
t
t
t
e
e
e
c
c
c
h
h
h
n
n
n
o
o
o
l
l
l
o
o
o
g
g
g
i
i
i
q
q
q
u
u
u
e
e
e
d
d
d
e
e
e
s
s
s
s
s
s
y
y
y
s
s
s
t
t
t
è
è
è
m
m
m
e
e
e
s
s
s
C
C
C
o
o
o
n
n
n
s
s
s
t
t
t
i
i
i
t
t
t
u
u
u
a
a
a
n
n
n
t
t
t
s
s
s
d
d
d
e
e
e
l
l
l
a
a
a
c
c
c
h
h
h
a
a
a
î
î
î
n
n
n
e
e
e
d
d
d
’
’
’
é
é
é
n
n
n
e
e
e
r
r
r
g
g
g
i
i
i
e
e
e
T
T
r
r
a
a
n
n
s
s
m
m
e
e
t
t
t
t
e
e
u
u
r
r
s
s
d
d
e
e
p
p
u
u
i
i
s
s
s
s
a
a
n
n
c
c
e
e

Doc. Ressources - Transmission puissance Page 2 sur 23
Un peu de vocabulaire :
Le dimensionnement des arbres sort du cadre de ce cours. Sachons tout de même qu’il s’effectue soit par un calcul
de résistance des matériaux, soit par résolution numérique sur logiciel de calcul par éléments finis.
2.2. Accouplements - Définitions
On s’intéresse plus particulièrement aux accouplements entre arbres alignés.
Ces accouplements assurent la transmission de puissance entre deux arbres de transmission alignés ou possédant
quelques défauts d’alignement.
La puissance à transmettre est donnée par la formule
ω
.
C
P
=
(solide tournant autour d’un axe fixe, P en Watt,
C, en N.m, ω en rad/s).
Les défauts d’alignement peuvent être de type : radial, axial, angulaire, écart angulaire en torsion :
1 : méplat ;
2 : saignée ;
3 : gorge ;
4 : dégagement ;
5 : filetage ;
6 : rainure ;
7 : épaulement ;
8 : chanfrein

Doc. Ressources - Transmission puissance Page 3 sur 23
Il est toutefois possible d’assurer la transmission de puissance entre deux arbres sécants par des joints
d’accouplement appelés joints de cardan. Suivant la solution adoptée, cette transmission pourra être homocinétique
ou non. Le joint d’accouplement est dit homocinétique, lorsqu’au cours du temps la vitesse de rotation de sortie,
reste à tout instant t, égale à la vitesse de rotation d’entrée.
Exemple d’accouplement réalisé avec deux joints de cardan
2.3. Accouplements permanents
Dans le cas d’un accouplement permanent, le désaccouplement n’est possible qu’après démontage. On distinguera :
- Les accouplements rigides ; ils ne tolèrent pas de défaut d’alignement.
- Les accouplements élastiques par joints d’accouplement ; ils tolèrent certains défauts d’alignement.
2.3.1. Accouplement rigide par manchon et clavettes
Il est nécessaire de dimensionner correctement une clavette afin qu’elle puisse transmettre le couple.
Le critère adopté est un critère de résistance au matage.
L’effort exercé par le moyeu sur la clavette est de la forme :
2
/
d
C
Fm
≈
.
Cet effort engendre une pression de contact supposée uniforme :
S
F
P
/
=
avec S surface du 1/2 flanc.
On fait souvent l’approximation
2
/
b
L
S
×
≈
.
P doit être inférieure à la pression de matage admissible par la clavette (de 30 à 100 MPa) :
admissible
PP
≤
.
2.3.2. Accouplement rigide par manchon et goupilles

Doc. Ressources - Transmission puissance Page 4 sur 23
Il est nécessaire de dimensionner correctement une goupille afin qu’elle puisse transmettre un couple ou un effort
axial. Le critère adopté est un critère de résistance au cisaillement.
Soit T l’effort de cisaillement.
Dans le 1
er
cas (transmission d’un couple),
m
C
D
T=××
2
2
d’où T=C
m
/D.
Dans le 2
nd
cas (transmission d’un effort axial), T=F/2.
La contrainte tangentielle moyenne est
S
T
=
τ
avec S section cisaillée de la goupille.
Il est d’usage d’adopter un coefficient de sécurité s (2 ou 3 selon les applications classiques).
La contrainte tangentielle moyenne
τ
doit alors être inférieure à la limite
r
τ
(de l’ordre de 150 MPa) du matériau
constituant la clavette, divisée par le coefficient s :
s
r
τ
τ
≤
.
2.3.3. Accouplement rigide par centrage et goupille(s)
2.3.4. Accouplement élastique par manchon à bagues élastomères
Les goupilles réalisent la transmission du couple.
Les vis d’assemblage réalisent uniquement
l’assemblage des deux plateaux et ne participent
pas à la transmission du couple.
Désalignement radial :
3
,
0
±
=
∆
r
mm ;
Désalignement axial :
4
±
=
∆
a
mm ;
Désalignement angulaire :
°
±
=
∆
5
α
.

Doc. Ressources - Transmission puissance Page 5 sur 23
2.3.5. Accouplement par joint de Oldham
2.4. Accouplements temporaires
L’accouplement est dit temporaire lorsque les deux arbres peuvent être désolidarisés, sous l’action d’une commande
extérieure (humaine ou automatisée).
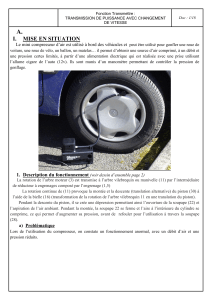
L’embrayage est un mécanisme qui permet sous l’effet d’une action extérieure, d’accoupler ou de séparer,
progressivement ou non, les arbres respectivement solidaires du moteur et du récepteur.
Dans le cas des freins, un arbre est fixe par rapport au bâti. La fonction est alors de ralentir ou d’arrêter l’arbre
en mouvement. Le principe du freinage repose sur l’apparition d’un couple résistant de frottement.
Beaucoup de systèmes de freinage existent : freins à tambours, à disques,……
La roue libre permet de transmettre la puissance entre deux arbres, mais uniquement pour un sens de rotation.
C’est une transmission unidirectionnelle. Ce comportement peut être obtenu à partir du phénomène d’arc-boutement
ou encore par des cliquets escamotables.
Arc-boutement Cliquets escamotables
Désalignement radial :
4
±
=
∆
r
mm ;
Désalignement axial faible ;
Désalignement angulaire nul ;
Joint homocinétique.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
1
/
23
100%