Doc : 1/18
Fonction Transmettre :
TRANSMISSION DE PUISSANCE AVEC CHANGEMENT
DE VITESSE
A.
I. MISE EN SITUATION
Le mini compresseur d’air est utilisé à bord des véhicules et peut être utilisé pour gonfler une roue de
voiture, une roue de vélo, un ballon, un matelas… il permet d’obtenir une source d’air comprimé, à un débit et
une pression certes limités, à partir d’une alimentation électrique qui est réalisée avec une prise utilisant
l’allume cigare de l’auto (12v). Ils sont munis d’un manomètre permettant de contrôler la pression de
gonflage.
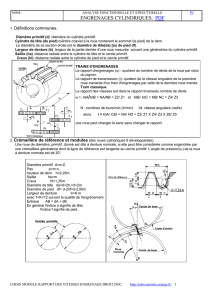
1. Description du fonctionnement (voir dessin d’ensemble page 2)
La rotation de l’arbre moteur (3) est transmise à l’arbre vilebrequin ou manivelle (11) par l’intermédiaire
de réducteur à engrenages composé par l’engrenage (1,5)
La rotation continue de (11) provoque la montée et la descente (translation alternative) du piston (30) à
l’aide de la bielle (16) (transformation de la rotation de l’arbre vilebrequin 11 en une translation du piston).
Pendant la descente du piston, il se crée une dépression permettant ainsi l’ouverture de la soupape (22) et
l’aspiration de l’air ambiant. Pendant la montée, la soupape 22 se ferme et l’aire à l’intérieure du cylindre se
comprime, ce qui permet d’augmenter sa pression, avant de refouler pour l’utilisation à travers la soupape
(28). a) Problématique
Lors de l’utilisation du compresseur, on constate un fonctionnement anormal, avec un débit d’air et une
pression réduits.

Doc : 2/18
Fonction Transmettre :
TRANSMISSION DE PUISSANCE AVEC CHANGEMENT
DE VITESSE

Doc : 3/18
Fonction Transmettre :
TRANSMISSION DE PUISSANCE AVEC CHANGEMENT
DE VITESSE
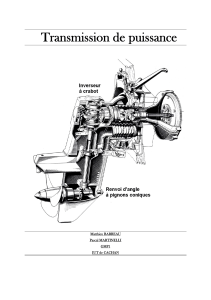
2. Etude Fonctionnelle
a) Complétez le diagramme « bête à corne » afin d’exprimer le besoin :
b) Complétez les solutions constructives du diagramme FAST ci-dessous :
A qui le Mini-Compresseur
rend service ?
Sur quoi le
Mini-Compresseur agit ?
A l’utilisateur.
La pression d'air
MINI-COMPRESSEUR

Doc : 4/18
Fonction Transmettre :
TRANSMISSION DE PUISSANCE AVEC CHANGEMENT
DE VITESSE
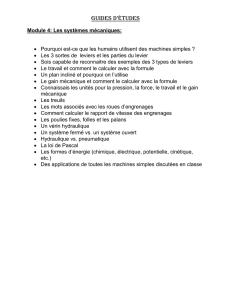
3. Modélisation cinématique
a) Complétez les classes d ‘équivalence ci-dessous :

Doc : 5/18
Fonction Transmettre :
TRANSMISSION DE PUISSANCE AVEC CHANGEMENT
DE VITESSE
A = {Sous-ensemble BATI} = {
B = {Sous-ensemble ARBRE MOTEUR } = {
C = {Sous-ensemble VILBREQUIN} = {
D = {BIELLE} = {
E = {Sous-ensemble PISTON} = {
b) Complétez le schéma cinématique de mini compresseur ci-dessous
4. Etude de réducteur à engrenage
a) Identifier les énergies entrante et sortante
b) Repérez la roue dentée et le pignon sur le dessin ci-contre :
Transmettre et adapter
l’énergie mécanique de
rotation
…………………
…………………
..
…………………
…………………
..
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%