5-kW Wind Energy Conversion System Modeling with Induction Generator
Telechargé par
liosonfack

See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/222792582
Modeling of a 5-kW Wind Energy Conversion System with
Induction Generator and Comparison with Experimental
Results
ArticleinRenewable Energy · May 2005
DOI: 10.1016/j.renene.2004.09.002
CITATIONS
32
READS
599
2 authors:
Tolga Sürgevil
Dokuz Eylul University
22 PUBLICATIONS114 CITATIONS
SEE PROFILE
Eyup Akpinar
Dokuz Eylul University
72 PUBLICATIONS462 CITATIONS
SEE PROFILE
All content following this page was uploaded by Eyup Akpinar on 16 March 2018.
The user has requested enhancement of the downloaded file.

Data bank
Modelling of a 5-kW wind energy conversion system
with induction generator and comparison
with experimental results
Tolga Su
¨rgevil, Eyu
¨p Akpınar*
Dokuz Eylu
¨l University, Department of Electrical and Electronics Engineering,
Kaynaklar Kampu
¨su
¨, 35160 Buca/Izmir, Turkey
Received 23 April 2004; accepted 13 September 2004
Available online 19 November 2004
Abstract
A 5-kW wind energy conversion system (WECS) having induction generator is designed and
implemented. The induction machine is connected to the power system through PWM inverter and
PWM rectifier. Two digital PI controllers are used, one of them is for regulating dc link voltage
and the other is for speed control of induction machine. The whole system is governed by a single
fixed point digital signal processing unit (DSP). A detailed simulation program is prepared by using
Matlab facilities in order to predict the performance of the controllers before implementation.
q2004 Elsevier Ltd. All rights reserved.
Keywords: Wind energy; Induction generator; PWM converter
1. Introduction
The power available from wind changes with the cube of the wind velocity. In order to
extract the maximum power at different value of wind speed, it is required to vary the
turbine speed over a wide range. This would not be possible if the squirrel cage induction
generator were directly connected to the power system at constant voltage and frequency.
Because the induction generator with this connection would allow the rotor speed to
change in a narrow range between the speed corresponding to maximum torque
0960-1481/$ - see front matter q2004 Elsevier Ltd. All rights reserved.
doi:10.1016/j.renene.2004.09.002
Renewable Energy 30 (2005) 913–929
www.elsevier.com/locate/renene
* Corresponding author. Tel.: C90 232 4531008x1163; fax: C90 232 4534279.
E-mail addresses: [email protected] (E. Akpınar), [email protected] (E. Akpınar).

and synchronous speed. Due to the advances in power electronics and digital signal
processing, the effective control of power conversion for a wide range of wind speed (from
3 to 20 m/s) has been implemented. Four and five megawatts wind turbines integrated with
the power electronic circuits will be used worldwide in near future [1]. The techniques
developed on torque and speed control of synchronous and induction machines are also
implemented in wind energy conversion systems (WECS) in order to draw the maximum
power available from the wind turbine.
The selection of the generator type depends on many factors such as application type,
machine characteristics, maintenance, price, etc. The well-known advantages of induction
generators are their robustness, low cost, and ease of maintenance. In wind energy
applications, the wound rotor types of them with the rotor voltage control circuitry are also
preferred in the case of direct connection to grid, since they provide some flexibility
against fluctuating wind due to asynchronous operation. The major disadvantage is that
they draw reactive power from the supply terminals.
The converters are usually located between power system and the generators at full
power rating of the wind turbine, except the slip energy recovery drive used with wound
rotor induction machine [2]. Modern control techniques, such as field oriented and space
vector controls, are employed for fast dynamic response to change of wind conditions and
power factor regulation. The three-phase PWM rectifiers are used in the WECS in order to
obtain unity power factor operation with the minimized current harmonics injected to the
power system [3–9].
The system described in this paper differs from the systems that use the same power
electronic converter topology given in [8–9] from the viewpoint of control methods. The
control of the converters in [8–9] is based on vector control method with fuzzy logic
controllers, but the scalar techniques are selected in this work. The dc link voltage
regulation and speed control of induction machine are carried out via proportional
integral (PI) controllers. A single fixed-point DSP is employed, and the ac currents of the
line-side converter and dc link voltage are controlled by hysteresis current control (HCC)
[5]. The speed control of the induction machine is achieved by employing the slip
regulation technique [10] because it provides inherent current limiting and reduces the
amount of measurement devices. These control methods eliminate the necessity of
system parameters. The system designed in this work uses a simpler control technique
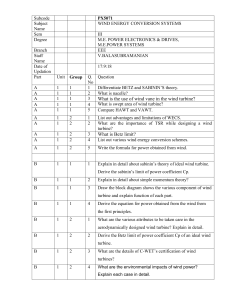
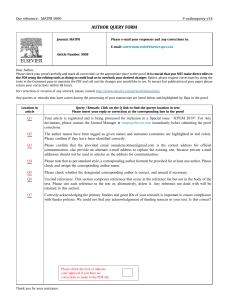
for a low power rated WECS. The schematic diagram and general view of the WECS are
shown in Figs. 1 and 2, respectively. The wind turbine is a propeller type, three-bladed
turbine and coupled to the induction machine shaft through a gearbox. A detailed
dynamic model of the drive system with induction machine is prepared in order to
predict the performance.
2. Mathematical model of induction machine
The variation of the utility voltage level at the armature terminals of the machine causes
a significant change on the torque speed characteristics because the electromagnetic torque
is proportional to the square of the voltage. In order to reduce the starting current and
increase the starting torque, some of the manufacturers have designed the induction motors
T. Su
¨rgevil, E. Akpınar / Renewable Energy 30 (2005) 913–929914

Fig. 1. Variable speed wind generation system.
T. Su
¨rgevil, E. Akpınar / Renewable Energy 30 (2005) 913–929 915

rated more than 5 kW as double cage. The induction machine used here has been bought as
an ordinary motor available in the market. Since its rotor has double cage structure, a
model of double cage induction machine given in (1) is considered in abc/qd reference
frame [11] by neglecting the effect of magnetic saturation.
va1
vb1
vc1
v0
q2
v0
d2
v0
q3
v0
d3
2
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
4
3
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
5
Z
r1CL11p00 Mp 0Mp 0
0r1CL11p0K1
2Mp Kffiffiffi
3
p
2Mp K1
2Mp Kffiffiffi
3
p
2Mp
00r1CL11pK1
2Mp ffiffiffi
3
p
2Mp K1
2Mp ffiffiffi
3
p
2Mp
Mp urffiffiffi
3
p
2LmKurffiffiffi
3
p
2Lmr0
2CðL0
22 CL0
23ÞpKurðL0
22 CL0
23ÞðL0
23 CMÞpKurðMCL0
23Þ
urMKffiffiffi
3
p
2Lmpffiffiffi
3
p
2LmpurðL0
22 CL0
23Þr0
2CðL0
22 CL0
23ÞpurðMCL0
23ÞðL0
23 CMÞp
Mp urffiffiffi
3
p
2LmKurffiffiffi
3
p
2LmðL0
23 CMÞpKurðMCL0
23Þr0
3CðL0
33 CL0
23ÞpKurðL0
33 CL0
23Þ
urMKffiffiffi
3
p
2Lmpffiffiffi
3
p
2LmpurðMCL0
23ÞðL0
23 CMÞpurðL0
33 CL0
23Þr0
3CðL0
33 CL0
23Þp
2
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
4
3
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
5
ia1
ib1
ic1
i0
q2
i0
d2
i0
q3
i0
d3
2
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
4
3
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
5
ð1Þ
Fig. 2. General view of WECS at Dokuz Eylu
¨l University Campus.
T. Su
¨rgevil, E. Akpınar / Renewable Energy 30 (2005) 913–929916
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%