Low-Cost PV System Controller Using Arduino and INC Algorithm
Telechargé par
Otman Oussalem

Our reference: MATPR 9999 P-authorquery-v14
AUTHOR QUERY FORM
Journal: MATPR
Article Number: 9999
Please e-mail your responses and any corrections to:
E-mail: [email protected].in
Dear Author,
Please check your proof carefully and mark all corrections at the appropriate place in the proof. It is crucial that you NOT make direct edits to
the PDF using the editing tools as doing so could lead us to overlook your desired changes. Rather, please request corrections by using the
tools in the Comment pane to annotate the PDF and call out the changes you would like to see. To ensure fast publication of your paper please
return your corrections within 48 hours.
For correction or revision of any artwork, please consult http://www.elsevier.com/artworkinstructions.
Any queries or remarks that have arisen during the processing of your manuscript are listed below and highlighted by flags in the proof.
Location in
article
Query / Remark: Click on the Q link to find the querys location in text
Please insert your reply or correction at the corresponding line in the proof
Q1 Your article is registered and is being processed for inclusion in a Special issue ``ICPEM 2019". For Any
deviations, please contact the Journal Manager at matpr@elsevier.com immediately before submitting the proof
corrections.
Q2 The author names have been tagged as given names and surnames (surnames are highlighted in teal color).
Please confirm if they have been identified correctly.
Q3 Please confirm that the provided email oussalem.otman@gmail.com is the correct address for official
communication, else provide an alternate e-mail address to replace the existing one, because private e-mail
addresses should not be used in articles as the address for communication.
Q4 Please note that as per standard style, a corresponding author footnote be provided for at least one author. Please
check and assign the corresponding author name.
Q5 Please check whether the designated corresponding author is correct, and amend if necessary.
Q6 Uncited references: This section comprises references that occur in the reference list but not in the body of the
text. Please cite each reference in the text or, alternatively, delete it. Any reference not dealt with will be
retained in this section.
Q7 Correctly acknowledging the primary funders and grant IDs of your research is important to ensure compliance
with funder policies. We could not find any acknowledgement of funding sources in your text. Is this correct?
Thank you for your assistance.
Please check this box or indicate
your approval if you have no
corrections to make to the PDF file

1
3A low cost controller of PV system based on Arduino board and INC
4algorithm
5
6
7O. Oussalem
⇑
,M. Kourchi,A. Rachdy,M. Ajaamoum,H. Idadoub,S. Jenkal
8LASIME (Engineering Science and Energy Management Laboratory) ENSA, Agadir, Morocco
9
11
article info
12 Article history:
13 Received 4 June 2019
14 Received in revised form 20 July 2019
15 Accepted 24 July 2019
16 Available online xxxx
17 Keywords:
18 PV
19 MPPT
20 Arduino
21 Incremental conductance (INC)
22 Matlab-Simulink
23
24
abstract
25
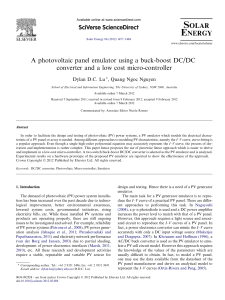
Photovoltaic (PV) systems offer a very competitive solution as an alternative energy source, but they have
26
a low efficiency. To overcome the problem of solar panel performance and achieve maximum efficiency, it
27
is necessary to optimize the design of all parts of the PV photovoltaic chain. Then we insert a stage of
28
adaptation between the photovoltaic generator (GPV) and the load. This stage which is controlled by a
29
microcontroller, will allow the system to search and reach the maximum power point (MPP). This algo-
30
rithm is among of other ones which are widely used in PV systems for their easy implementation as well
31
as their low cost. This algorithm was analyzed and its performance was evaluated by using the Arduino
32
board via Matlab-Simulink tool.
33
Ó2019 Elsevier Ltd. All rights reserved.
34
Selection and peer-review under responsibility of the scientific committee of the International
35
Conference on Plasma and Energy Materials ICPEM2019.
36
37
38
39
1. Introduction
40
In line with, its energy strategy which aims to achieve energy
41
independence, Morocco has accorded high priority to convert to
42
the renewable energies and especially solar thermal and photo-
43
voltaic energy [1].
44
Photovoltaic energy is a solution for the production of renew-
45
able energy based on a photovoltaic generator (GPV) from the solar
46
flux. In its operation a GPV has non-linear characteristics, which
47
depend among other things on the illumination, the temperature
48
of the cell and also on the characteristics of the charge. An adaptive
49
stage is inserted between the GPV and the load. This stage allows
50
driving the system to the maximum power point (MPP).
51
The aim of this work is the design and realization for the control
52
of different parties of a photovoltaic system by low cost board
53
(Arduino board) via the Matlab-Simulink software. The PV system
54
is customized by an ‘‘incremental” strategy which is a type of MPPT
55
algorithms that will ensure the achievement of the maximum
56
power provided by the PV module [2,3].
57
Various results are presented in this article in order to validate
58
this control platform as being the most cost-effective and efficient
59
for the optimization of the photovoltaic chain.
60
This article is divided into five parts: After the introduction, the
61
second part gives a general description of a photovoltaic system.
62
The third part deals with the interface based on the Arduino board
63
under the Matlab-Simulink environment. The fourth one will be
64
dedicated to the experimental results of the system studied.
65
Finally, this study finishes with a conclusion.
66
2. Photovoltaic system
67
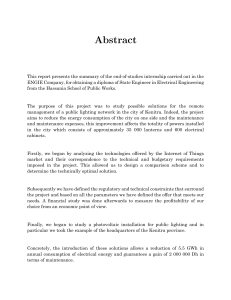
The photovoltaic system under study consists of four blocks as
68
shown in Fig. 1. The first block represents the photovoltaic emula-
69
tor, the second block is the static converter DC-DC Buck-Boost, the
70
third block represents the DC load and the fourth one is the system
71
controller.
72
2.1. PV emulator
73
The PV panels are depends on climatic conditions, that’s why
74
we chose to employ a PV emulator.
75
This PV emulator is an electronic power system able to repro-
76
duce the characteristics of the solar panel, and which has the fol-
77
lowing characteristics [4]:
78
It consists of three independent blocks emulating solar panels;
79
Voltage of open circuit is 20 V;
80
Short-circuit current up to 2 A;
https://doi.org/10.1016/j.matpr.2019.07.689
2214-7853/Ó2019 Elsevier Ltd. All rights reserved.
Selection and peer-review under responsibility of the scientific committee of the International Conference on Plasma and Energy Materials ICPEM2019.
⇑
Corresponding author.
E-mail address: [email protected] (O. Oussalem).
Q5
Q1
Q2
Q3
Materials Today: Proceedings xxx (xxxx) xxx
Contents lists available at ScienceDirect
Materials Today: Proceedings
journal homepage: www.elsevier.com/locate/matpr
MATPR 9999 No. of Pages 7, Model 5G
8 August 2019
Please cite this article as: O. Oussalem,M.Kourchi,A.Rachdy et al., A low cost controller of PV system based on Arduino board and INC algorithm, Materials
Today: Proceedings, https://doi.org/10.1016/j.matpr.2019.07.689

81
Displays voltage and current variables on integrated displays for
82
each of the three blocks;
83
Simulation adjustable intensities of solar irradiation, each of the
84
three blocks.
85
86
For an irradiation of 400 W/m
2
, the characteristics (I–V) and (P–
87
V) of the photovoltaic emulator are illustrated in Figs. 2 and 3.
88
2.2. Static converter
89
The main role of the Buck-Boost power converter is to ensure
90
impedance matching, so that the output of the PV emulator deliv-
91
ers the maximum energy.
92
The electronic circuit corresponding to the Buck-Boost realized
93
(Fig. 4), is essentially based around the power MOSFET transistor,
94
type IRF730, driven by the Arduino control board via a driver, as
95
well as a diode, and passive components (L, C) ensuring the
96
smoothing and filtering of the current electric [5].
97
The main variables characterizing the Buck-Boost converter
98
[5,6] are:
99
The output voltage is :V
s
¼
a
1
a
V
e
ð1Þ
101101
102
The output current is :I
s
¼1
a
a
I
e
ð2Þ
104104
105
The current ripple :
D
I
L
¼
a
V
e
Lf ð3Þ
107107
108
The voltage ripple :
D
V
C
¼
a
I
s
Cf ¼
a
2
V
e
ð1
a
ÞRCf ð4Þ
110110
111
With:
112
a
: The duty cycle of the PWM signal or PWM.
113
f: The frequency of the PWM signal.
114
V
C
: voltage across the capacitor.
115
I
L
: current through the coil.
116
R: resistive load.
117
L and C: inductor and capacitor constituting the filter. The filter
118
values are: L 0.9 mH and C 27 mF.
119
120
2.3. PWM generator
121
There are a lot of generators of PWM signal, the used one is
122
based on the TL494 component. This is an integrated circuit of
123
pulse width modulation control for fixed frequency signals. The
124
circuit accompanying the TL494 component is described in the
125
electrical schema of Fig. 5 [7].
126
This generator can operate at frequencies up to 400 kHz.
127
According to technical documents of TL494 builder, the approxi-
128
mate oscillation frequency is determined by [7]:
129
f
c
¼1:1
R
t
C
t
ð5Þ
131131
Fig. 1. Schematic diagram of PV system with MPPT.
Fig. 2. The characteristic P (V) of the PV emulator for G = 400 W/m
2
.
Fig. 3. The characteristic I (V) of the PV emulator for G = 400 w/m
2
.
Fig. 4. Circuit of Buck-Boost converter.
2O. Oussalem et al. / Materials Today: Proceedings xxx (xxxx) xxx
MATPR 9999 No. of Pages 7, Model 5G
8 August 2019
Please cite this article as: O. Oussalem,M.Kourchi,A.Rachdy et al., A low cost controller of PV system based on Arduino board and INC algorithm, Materials
Today: Proceedings, https://doi.org/10.1016/j.matpr.2019.07.689

132
The duty cycle of the PWM signal is controlled by a voltage that
133
varies from 0 V to 2.5 V. The Mosfet used must be controlled by a
134
PWM signal greater than 7 V, for that reason, a driver was realized
135
for amplifying the signal of the PWM generator.
136
To follow the MPP, the platform needs two sensors: current and
137
voltage sensor. The voltage measurement is performed from a volt-
138
age divider to have a voltage between 0 and 5 V. The output of this
139
divider drives a follower amplifier realized by the circuit ‘‘LM324”
140
to the impedance matching. However the current measurement is
141
done by a shunt resistor of 1
X
.
142
3. MPPT strategy and support package for Arduino board
143
The strategy of maximizing the power from a photovoltaic
144
source is to seek the optimum operating point. This technique is
145
called: the MPPT strategy.
146
There are several types of MPPT strategies, among which is the
147
incremental conductance (INC) command, which this technique is
148
based on the knowledge of the GPV Conductor Variation and Posi-
149
tion Consequences operation in relation to a MPP [8].
150
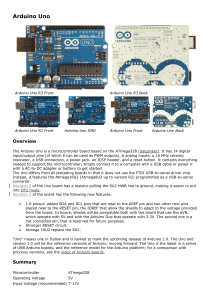
Fig. 6 shows that the maximum power can then be tracked
151
by making comparisons to each moment of the value of the con-
152
ductance (Ipv/Vpv) with that of the increment ofConductance
153
(
D
Ipv/
D
Vpv). Vr corresponds to the reference voltage and forces
154
the GPV to operate at this value. If you are at the PPM, then the
155
voltage Vr corresponds well to the optimum voltage Vopt. Once
156
the PPM is reached, the operation can be maintained on this
157
position until a variation of
D
Ipv. This then indicates a change
158
in climatic conditions, so a new MPCs search. For this, the algo-
159
rithm increments or decrements the value of Vr up to reach the
160
MPP [9].
161
Matlab (Matrix laboratory) is a fourth-generation programming
162
language, developed by MathWorks. Matlab has provided a tool
163
books for Arduino called the support package, which includes a
164
Simulink block library to configure and access the sensors, actua-
165
tors and Arduino communication interfaces [2,3].
Fig. 5. PWM generator based on the TL494 circuit.
Fig. 6. Conventional flow chart of the MPPT control type ‘incremental conductance’.
O. Oussalem et al. / Materials Today: Proceedings xxx (xxxx) xxx 3
MATPR 9999 No. of Pages 7, Model 5G
8 August 2019
Please cite this article as: O. Oussalem,M.Kourchi,A.Rachdy et al., A low cost controller of PV system based on Arduino board and INC algorithm, Materials
Today: Proceedings, https://doi.org/10.1016/j.matpr.2019.07.689

166
This developed configuration (Fig. 7) is for the treaty system,
167
based on the Simulink environment.
168
4. Experimental result
169
The experimental realization of the photovoltaic system under
170
study, as shown in the Fig. 8, is composed of a PV emulator, a
171
Buck-Boost chopper, sensors of Ipv (PV emulator current) and
172
Vpv (PV emulator voltage), a resistive load, and an Arduino Mega
173
board.
174
The experimental test of the studied system should start by
175
attacking the Arduino board, by the program of the ‘incremental
176
conductance’ strategy treated previously.
177
It is noted that during the experimental process, some adapta-
178
tions and calibrations were made between the various variables
179
treated in the photovoltaic system. Thus the system can search
180
for and converge towards the point of maximum power.
181
The PV emulator offers the possibility to choose the G value of
182
the irradiation by selecting one of the two values 400 and
183
600 W/m
2
, in order to see the influence of the ‘incremental conduc-
184
tance’ strategy on the PV emulator’s output power (Ppv).
185
Fig. 9 describes the evolution of the PV emulator’s output power
186
for the irradiation G = 400 W/m
2
.
187
Those figures illustrate the curves of the PV emulator’s output
188
power Ppv as a function of the time and of the voltage Vpv. These
189
curves are processed in order to show that the photovoltaic system
190
realized was able to seek and follow the power supplied and to
191
reach the output power around the maximum power point (MPP)
192
at around 13 W for an irradiation of G = 400 w/m
2
.
193
It is also remarkable in Fig. 10, that the system following its
194
curves of the PV emulator’s output power in function of the voltage
195
and of the time, behaves by the same way in a second test for irra-
196
diation G = 600 w/m
2
. So it was able to reach the output power
197
around its new maximum power point (around of 16 W).
Fig. 7. Control Simulink interface.
Fig. 8. The parts of the designed PV chain.
4O. Oussalem et al. / Materials Today: Proceedings xxx (xxxx) xxx
MATPR 9999 No. of Pages 7, Model 5G
8 August 2019
Please cite this article as: O. Oussalem,M.Kourchi,A.Rachdy et al., A low cost controller of PV system based on Arduino board and INC algorithm, Materials
Today: Proceedings, https://doi.org/10.1016/j.matpr.2019.07.689
 6
7
6
7
1
/
7
100%