Abstract— It is well known that measuring the input voltage
and current, as the feedforward and feedback terms, are vital
for the controller design in the problem of power factor
compensation (PFC) of an AC-DC boost converter. Traditional
adaptive scenarios corresponds to the simultaneous estimation
of these variables are failed because the system dynamics is not
in the classical adaptive form. In this paper, the system
dynamics is immersed to a proper form by a new filtered
transformation to overcome the obstacle. The phase and
amplitude of the input voltage along with the input current is
exponentially estimated from the output voltage with global
convergent. An application of the proposed estimator is
presented in conjunction with a well-known dynamic
controller.
I. INTRODUCTION
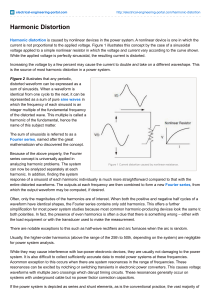
Consider the single-phase full-bridge boost converter
shown in Fig. 1. The circuit of the converter combines two
pair of transistor-diode switches in two legs to form a
bidirectional operation. The switches in each leg operate in
complementary way and are controlled by a PWM circuit.
The dynamic equations describing the average behavior of
the converter can be obtained using the Kirchhoff’s laws as
(1)
(2)
where describes the current flows in the inductance ,
and is the voltage across both the capacitance and
the load conductance . The continuous signal
operates as a control input and is fed to the PWM circuit to
generate the sequence of switching positions . The switch
position function takes the values in finite set [1].
Finally, represents the voltage of the
AC-input.
The problem of power factor compensation (PFC) for an
AC-DC boost converter has widely been studied by many
researchers due to its applications for interfacing renewable
energy sources to hybrid microgrids [2], flexible AC
transmission systems [3], motor drive systems [4], LED drive
systems [5] etc. Knowledge about the phase and amplitude of
AC-source is vital to provide the feedforward control signal
in the problem of PFC of an AC-DC boost converter; see
control signals in [6] and [7]. Besides an accurate measuring
of these parameters, feedback from input current improves
output voltage regulation, total harmonic distortion (THD)
M. Tavan is with the Department of Electrical Engineering,
Mahmudabad Branch, Islamic Azad University, Mahmudabad, Iran (e-mail:
m.tavan@srbiau.ac.ir).
K. Sabahi is with the Department of Electrical Engineering, Mamaghan
Branch, Islamic Azad University, Mamaghan, Iran.
and power factor quality [6]. It is worth noting that, the AC-
DC boost converter belongs to second-order bilinear systems
group and both of its states are not observable when the
control signal is zero. These features pose an interesting state
and parameter estimating problem.
Figure 1. AC-DC full-bridge boost converter circuit [8].
In this paper the effect of the phase difference between
the input voltage and current on the power quality is
investigated. Specially, the DC error and the amplitude of
harmonic in the output voltage increase for big values of the
phase shift. Hence, the problem of phase difference
estimation is interested in this paper. A new nonlinear,
globally convergent, and robust estimator is designed via
immersion and invariance (I&I) based filtered
transformation (see [9-11] for some applications of the
method). The input current and voltage is exponentially
estimated from the output voltage via a fifth- dimensional
estimator. An application of the estimator is presented in
conjunction with a well-known dynamic controller.
II. PROBLEM STATEMENT
For the system, the control objective is to regulate in
average the output (capacitor) voltage in some constant
desired value with a nearly unity power factor in
input side. The objective can be achieved indirectly by means
of stabilizing input (inductor) current in phase with the source
voltage. This is done due to unstable zero dynamic with
respect to the output to be regulated which imposed a second-
order harmonic on the output in steady-state [8].
Let us to assume that the input current has the following
steady-state form
(3)
for some constant as the phase difference
between input voltage and current, and some yet to be
specified. Replacing (3) into (2) yields
(4)
Input Voltage and Current Sensorless Control of a Single Phase AC-
DC Boost Converter
Mehdi Tavan and Kamel Sabahi

where and are the control input and output voltage in
steady-state. Now, replacing (3) and (4) into (1) yields the
following dynamics in steady-state
(5)
The steady-state solution of (4) can be calculated using
Fourier series and is given by
(6)
with
(7)
(8)
Finally, doing a basic trigonometric simplification (6) takes
the form
(9)
with
(10)
(11)
The new representation, given by (9), demonstrates the
relationship between the phase difference and the steady-state
amplitude of the input current and the second-order harmonic
on the output.
Remark 1: The DC-component of in steady state can be
concluded from (9) and is given by
(12)
As a result, in order to provide the desired output voltage ,
the input current amplitude must be forced to achieve
(13)
which justifies the fact that for any phase shift (positive or
negative) the input current and then the converter losses
increases. For , the minimum value of can be
achieved and is defined as
(14)
As an example, consider the static control law in [8]
which causes the following input current in steady-state
(15)
with for some constant . Replacing the
amplitude and phase of the current in (12) yields to
(16)
which indicates a steady state error in output voltage.
Remark 2: The minimum amplitude of the second-order
harmonic does not occur for . From (10) it can
be computed that for which satisfies the following
inequality
(17)
the magnitude of is less than . From (17) it can
be concluded that when the converter operates in leading
form, i.e. , the magnitude of increases, but, it
can be decreased when the converter operates in lagging form
with a small near to zero.
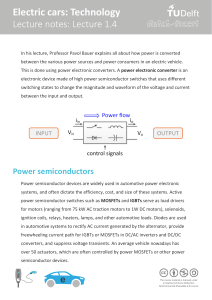
For instance consider the experimental system used in [8]
with the set of parameters; , ,
, , and . The ratio of
to is shown in Fig. 2 for
and . Fig. 2 justifies
the above statements and shows that a small lagging phase
shift can be beneficial to reduce the harmonic amplitude. This
may be induced by time delays or unmodeled dynamics in
the actual system. On the other hand, a big phase difference,
in leading or lagging form, causes high harmonic amplitude
as shown in Fig. 2.
Figure 2. The influence of and on the amplitude of the second-order
harmonic.
With respect to the remarks above which cite the
importance of phase difference in the power quality, in this
paper we are interested to estimate the parameter vector
(18)

from the output voltage . The phase and the amplitude
can be obtained from the above vector as
(19)
(20)
and the correspond regressor can be defined as
(21)
to get
(22)
III. ESTIMATOR DESIGN
In this section an estimator is designed for the system (1),
(2) which requires the knowledge about , , , and . It
should be noted that the only measurable state is the output
voltage . This cancels the use for input current sensor and
makes the practical implementation of the proposed
procedure attractive. In the design procedure the following
assumptions are considered.
Assumption 1: The control signal is PE, which will be
indicated as .
Assumption 2: The time derivative of is bounded and
available.
Assumption 3: The system (1), (2) is forward complete,
i.e. trajectories exist for all .
Assumption 1 is needed so that the input current become
observable from the output voltage . The assumption is
satisfied in operation mode when the system is forced to track
a positive constant as the desired output. Although
Assumption 2 seems to be somewhat restrictive, a dynamic
control law, like the one introduced in Proposition 8.9 of [8],
satisfies the assumption. The final assumption is standard in
the estimator design and is extremely milder compared to the
boundedness of trajectories.
A. Design procedure
In order to form a proper adaptive structure the following
input-output filtered transformation is considered
(23)
where is an auxiliary dynamic vector, which its
dynamics are to be defined. The equation above admits the
global inverse
(24)
where is the new unavailable vector. The
dynamics of the new variable can be obtain as
(25)
with
(26)
where and are the zero matrix and zero
vector, respectively. The dynamics of the output voltage (1)
can be rewritten in terms of the new variable as
(27)
where
(28)
Now, under the inspiration of the I&I technique, let us to
define the estimation error as
(29)
where is the estimator state, and the mapping
yet to be specified. From (24)
and (29), the current estimation error can be obtained as
(30)
in which and with
, , and .
To obtain the dynamics of differentiate (29), yielding
(31)
Let
(32)
which cancels the known terms in the error dynamics and
yields to
(33)
The following proposition put forward a selection of
and , which renders the origin of the system (33) attractive.
Proposition 1: Consider the system (33) verifying
Assumption 1-3, with
(34)
(35)
where is the identity matrix, and
are constant and positive definite matrixes, and is a
constant value. Then the system (33) has a uniformly
globally stable equilibrium at the origin, and

asymptotically converges to zero. Moreover, the regressor
is PE and then converges to zero exponentially.
Proof 1: The proof is constructed in three steps. In Step 1
the convergence of is proved. Step 2 shows that .
Finally, the convergence of is proved in Step 3.
Step 1: Substituting (34), (35) into (33) yields the error
dynamics
(36)
Consider now the following Lyapunov function candidate
(37)
whose time-derivative along the trajectories of (36) satisfies
(38)
for some constant . This implies that the system
(36) has a uniformly globally stable equilibrium at the
origin, and then , and finally
and then . It is clear that, the dynamic (35) is
input-to-state stable with respect to which is given by
(21). Hence, due to then and . Now
with respect to Assumption 2 and (36) it can be concluded
that and then . Therefore, the uniformly
convergence of , and then to zero follows directly by
Lemma 1 in [12].
Step 2: Notice that, for the asymptotic stable filter (35),
if [13]. The PE condition implies the
existence of a constant such that
(39)
for all and all . With respect to
(21), a straightforward check for the inequality above
obtains by parameterizing with
[13], which yields to
(40)
for all . This implies that .
Step 3: As shown in Step 1, converges to zero. Let us to
assume that after the convergence time of , there exists a
time instance such that
(41)
for any constant . By virtue of the assumption
above, using (41) and (37) in (38) and applying some basic
bounding, results in
(42)
for some constant . After the convergence time of
, (42) can be written as
(43)
Integrating (43) when yields the solution
(44)
with and it is well known that .
Considering (39), (40) and invoking Proposition 2 in [13] for
some constant and all implies that
(45)
due to . Therefore, there exists some time instants
, such that (44) satisfies
(46)
for some constant , which implies that
(47)
This contradicts with (41) and induces attractiveness of the
equilibrium by contradiction. This property is uniform
with respect to . Therefore the equilibrium is
uniformly asymptotically stable. Indeed, due to linear form
of the time-varying system (36), the convergence property is
exponential by Theorem B.1.4 in [14].
Remark 3: With respect to (29) and (30), the equilibrium
point admits to estimating and by
(48)
(49)
Indeed, from (19) and (20) an estimate of and can be
obtained by
(50)
(51)
IV. OUTPUT FEEDBACK CONTROL
The PFC main function is to achieve unity power factor.
This happens if the input current to be in the phase with the
AC-source. This can be achieved by the following dynamic
control law [6]

(52)
where is derived from the filter
(53)
with some positive constants , , , and
(54)
with positive constant value , where
and is given by (14). For sufficiently large , the closed
loop system is asymptotically stable, and then converges to
zero and converges to [6]. Note that, from analysis in
Remark 1, for in (12) with zero phase difference, i.e.
, the output voltage converges in average to . On
the other hand, and in (54) are sinusoid signals, hence
we can conclude that is sinusoid in the steady state. As a
result and Assumption 1 is satisfied.
From (54), it is clear that an accurate measuring of the
input voltage and current is vital to achieve control
objective. Hence, the state and parameter estimation given
by (49)-(51) can be used in conjunction with the
aforementioned dynamic control law. Notice that, with
respect to (14), singularity problem can be occurred when
is used to estimate in . In order to circumvent the
problem, we assume that is lumped in the arbitrary gain
in (53) and the signal
(55)
is fed to the filter (53) instead of . An estimate of can be
obtained by
(56)
with
(57)
(58)
Finally, the control system in the closed loop with the
estimator will be complete by
(59)
with
(60)
where is related to in (53) with .
V. CONCLUSION
In this paper the effect of the phase difference between
the input voltage and current on the power quality is
investigated. Specially, the DC error and the amplitude of
harmonic in output voltage increase for big values of the
phase shift. A new nonlinear, globally convergent, robust
estimator is designed via I&I based filtered transformation.
The input current and voltage is exponentially estimated
from the output voltage via a fifth-dimensional estimator. An
application of the estimator is presented in conjunction with
a well-known dynamic controller.
REFERENCES
[1] G. Escobar, D. Chevreau, R. Ortega, and E. Mendes, "An
adaptive passivity-based controller for a unity power factor
rectifier," IEEE Transactions on Control Systems Technology,
vol. 9, pp. 637-644, 2001.
[2] X. Lu, J. M. Guerrero, K. Sun, J. C. Vasquez, R. Teodorescu,
and L. Huang, "Hierarchical control of parallel AC-DC
converter interfaces for hybrid microgrids," IEEE Transactions
on Smart Grid, vol. 5, pp. 683-692, 2014.
[3] A. M. Bouzid, J. M. Guerrero, A. Cheriti, M. Bouhamida, P.
Sicard, and M. Benghanem, "A survey on control of electric
power distributed generation systems for microgrid
applications," Renewable and Sustainable Energy Reviews, vol.
44, pp. 751-766, 2015.
[4] G. Cimini, M. L. Corradini, G. Ippoliti, G. Orlando, and M.
Pirro, "Passivity-based PFC for interleaved boost converter of
PMSM drives," IFAC Proceedings Volumes, vol. 46, pp. 128-
133, 2013.
[5] G. Calisse, G. Cimini, L. Colombo, A. Freddi, G. Ippoliti, A.
Monteriu, et al., "Development of a smart LED lighting system:
Rapid prototyping scenario," in Systems, Signals & Devices
(SSD), 2014 11th International Multi-Conference on, 2014, pp.
1-6.
[6] D. Karagiannis, E. Mendes, A. Astolfi, and R. Ortega, "An
experimental comparison of several PWM controllers for a
single-phase AC-DC converter," IEEE Transactions on control
systems technology, vol. 11, pp. 940-947, 2003.
[7] R. Cisneros, M. Pirro, G. Bergna, R. Ortega, G. Ippoliti, and M.
Molinas, "Global tracking passivity-based pi control of bilinear
systems: Application to the interleaved boost and modular
multilevel converters," Control Engineering Practice, vol. 43,
pp. 109-119, 2015.
[8] A. Astolfi, D. Karagiannis, and R. Ortega, Nonlinear and
adaptive control with applications: Springer Science & Business
Media, 2007.
[9] M. Tavan, A. Khaki-Sedigh, M.-R. Arvan, and A.-R. Vali,
"Immersion and invariance adaptive velocity observer for a class
of Euler–Lagrange mechanical systems," Nonlinear Dynamics,
vol. 85, pp. 425-437, 2016.
[10] M. Tavan, K. Sabahi, and S. Hoseinzadeh, "State and Parameter
Estimation Based on Filtered Transformation for a Class of
Second-Order Systems," arXiv preprint arXiv:1803.01139,
2018.
[11] M. Malekzadeh, A. Khosravi, and M. Tavan, "Immersion and
invariance Based Filtered Transformation with Application to
Estimator Design for a Class of DC-DC Converters,"
Transactions of the Institute of Measurement and Control, vol.
(Accepted), 2018.
[12] G. Tao, "A simple alternative to the Barbalat lemma," IEEE
Transactions on Automatic Control, vol. 42, p. 698, 1997.
[13] A. A. Bobtsov, A. A. Pyrkin, R. Ortega, S. N. Vukosavic, A. M.
Stankovic, and E. V. Panteley, "A robust globally convergent
position observer for the permanent magnet synchronous motor,"
Automatica, vol. 61, pp. 47-54, 2015.
[14] R. Marino and P. Tomei, Nonlinear control design: geometric,
adaptive and robust: Prentice Hall International (UK) Ltd.,
1996.
1
/
5
100%