Predictive Direct Power Control - A New Control Strategy for DCAC Converters
Telechargé par
taibi djamel

Predictive Direct Power Control - A New Control Strategy for DC/AC Converters
Sergio Aurtenechea1 Miguel Angel Rodríguez1 Estanis Oyarbide2 José Ramón Torrealday1
(1)Faculty of Engineering,University of Mondragon, Loramendi 4, Aptdo. 23, 20500 Arrasate, Spain
[email protected], marodriguez@eps.mondragon.edu, jrtorreal[email protected]
(2)Aragón Institute for Engineering Research (I3A), University of Zaragoza, María de Luna 1, 50018 Zaragoza, Spain
Abstract –This paper proposes the Predictive Direct Power
Control (P-DPC), a new control approach where the well-
known direct power control (DPC) is combined with a
predictive selection of a voltage-vectors sequence, obtaining
both high transient dynamic and constant switching frequency.
Two different P-DPC versions are developed based on two
different types of voltage sequences: a two-vector one and a
three-vector one. Simulation results of the three-vector sequence
P-DPC are compared to standard Voltage Oriented Control
(VOC) strategies. Thanks to its high transient capability and its
constant switching behaviour the P-DPC could become an
interesting alternative of standard VOC techniques for grid-
connected converters.
I. INTRODUCTION
During the last ten years Medium and Low Voltage grids
have been interconnected to a large number of new active
systems as wind turbines, hydraulic generators, biomass and
geothermal generators, photovoltaic systems, fuel cells,
storage devices, power quality improvement units (FACTS,
D-FACTS, etc.) and others. Almost all of these new
installations are interconnected to the grid by means of a
Voltage Source Inverter (VSI) and a filter [1]. Generally
these devices must provide a target active and/or reactive
power level to the line, so appropriate Power Control systems
are required.
This paper is focused on the control of active and reactive
power-flows of grid-connected VSIs. After a brief
description of commonly used control schemes, we propose a
new control approach: the Predictive Direct Power Control
(P-DPC). Next we develop two control solutions within the
P-DPC approach. Comparative simulations of a grid
connected three-phase VSI under P-DPC and Voltage
Oriented Control strategies show the main advantages of the
proposed control strategy.
II. INDIRECT AND DIRECT POWER STRATEGIES
The control techniques which are commonly used in grid
connected converter systems could be classified as direct or
indirect control strategies. The indirect control is
characterized by a modulator (Pulse Wide Modulation PWM
or other) that computes the turn-on/turn-off times of
converter’s switches along a switching period by the
evaluation of the voltage reference. This voltage reference is
issued by the controller, which idealizes the converter as a
dependent continuous voltage source. On the other hand,
direct control techniques establish a direct relation between
the evolution of the controlled variable and the state of
converter’s switches.
A. Indirect Power Control Techniques
Voltage Oriented Control (VOC) is a widely used indirect
control strategy. It is based on the knowledge of the position
of the line-voltage vector’s and the relative spatial orientation
of the current vector [2-4]. It exploits the well-known Park’s
transformation to a rotating dq0 reference frame aligned with
the line-voltage or the Clark’s transformation to a static αβ0
reference frame.
Recent developments have popularised the Virtual Flux
(VF) concept, where it is supposed that both the grid and
converter’s line filter behave as an AC motor. Thus the
resistance and the inductance of the filter are equivalent to
the phase resistance and the leakage inductance of the motor,
whereas the phase voltage of the converter is related to a
fictitious virtual flux [5,6]. One of the main advantages of
this new approach is that it is less sensitive than other
approaches face to line-voltage variations. The Virtual Flux
Oriented Control (VFOC) is an adaptation of the VOC to a
VF reference frame [5,6].
Indirect control strategies lead generally to good transient
behaviour and acceptable steady-state operation. They
operate at constant switching frequency, which makes it
possible the use of advanced modulation techniques. This
way it becomes easier to optimize conversion power loses or
to simplify the line-side filter design.
However, these control techniques presents some
disadvantages. The main problem is common to any indirect
control strategy under a PWM-type modulation: the
switching period adds some time delays in such a way that, if
it is not small enough, it becomes impossible to exploit all
the available structural dynamic of the system
B. Direct Power Control Techniques
Direct Power Control (DPC) is one of the most popular
direct control strategies of grid-connected converters [5,6,8-
10]. This technique is derived from the first and original
Direct Torque Control (DTC) of AC machines. In each
sampling time it evaluates which one of the instantaneous
voltage vectors available at the output of the converter is best
suited in order to push the state of the system towards the
reference value. As this evaluation is continuously carried
out, direct control technique does not require any modulator
and it is able to get the maximum of the available structural
dynamic from the system. Moreover, it does not require any
internal control loop neither any coordinate transformation,
in such a way that coupling effects between transformed
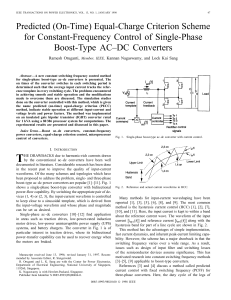
variables are avoided. In the DPC case, instantaneous active
and reactive power control loops are based on hysteresis
regulators that select the appropriate voltage vector from a
look-up table, see Fig.1.
16611-4244-0136-4/06/$20.00 '2006 IEEE

The DPC technique has also been implanted under the VF
concept, leading to the Virtual Flux Direct Power Control
(VF-DPC) [5,6].
The main disadvantage of the DPC strategy is the resulting
variable switching frequency, which generates an unwished
harmonic range and makes it difficult to design the line-filter.
In order to overcome this problem several approaches have
been explored. The mixed DPC-SVM approach is an
evolution of VFOC and VF-DPC techniques in such a way
that it provides the required converter’s average voltage,
which is applied by a Space Vector Modulation (SVM) [7].
This strategy could be defined as a direct control method
based on the fact that converter’s average voltage vector is
directly computed using active and reactive power tracking
requirements. Nevertheless, in the frame of this paper and
taking into consideration that it uses a modulator, it should be
classified as an indirect control strategy.
Predictive approaches have also been exploited in order to
overcome the variable switching frequency problem of the
DPC strategy. These solutions have been mainly employed in
the control of AC machines [11-13]. Instead of selecting an
instantaneous optimal voltage vector (DTC-case), predictive
type approaches select an optimal set of concatenated voltage
vectors, the so-called voltage vector’s sequence. The control
problem is solved computing the application times of the
vectors of the sequence in such a way that the controlled
variables converge towards the reference values along a fixed
predefined switching period. This way constant switching
frequency operation is obtained. Several authors have
developed this concept in multilevel converter topologies
linked to different kind of machines but there are few
predictive control cases on line-connected VSI systems.
Some authors propose predictive current control algorithms
related to power control requirements but this works present
variable switching frequencies [14,15].
There is an interesting work related to line-current control
where a sliding-control type approach is combined with a
predictive computing of voltage application times [16]. This
way both high transient dynamic and constant switching
frequency are obtained.
Based on this idea, it would be interesting to develop a
new approach where direct power control is combined with
predictive vector sequence selection, obtaining both high
transient dynamic and constant switching frequency.
DC/AC
Converter
Look up
Table
VDC
Q_ref
Grid Voltage
Sector Select
p q
θk
Hysteresis
Controllers
va
vb
vc
ika
ikb
ikc
L
L
L
vka
vkb
vkc
VDC
_
ref
X P_ref
Sa S
b
Sc
VDC Voltage Regulation
P
ower Regulation
Power
Calculation / Estimation
Fig. 1. Block diagram of DPC
III. PREDICTIVE DIRECT POWER CONTROL. THEORY
AND APPLICATION TO A THREE-PHASE VSI
The Predictive Direct Power Control (P-DPC) selects the
best voltage-vector sequences and computes their application
times in order to control the power flow through the VSI
under a constant switching frequency operation. This strategy
requires a predictive model of the instantaneous power
evolution. Next, we show this predictive model and two
possible control strategies.
A. Predictive Model of Instantaneous Power Evolution in a
line-connected VSI
The definition of instantaneous active or reactive power is
still a source of controversy between the researchers. Among
all the theories that have been successively proposed during
the last years we retain the “original” three-wire system’s
definition [17]. This way, instantaneous active and reactive
powers are defined as follows (1):
−
=
β
α
αβ
βα
i
i
vv
vv
q
p (1)
With vα-β and iα-β the line voltage and current in static αβ
coordinates. The prediction of the evolution of the power is
based on the knowledge of the instantaneous variation of
active and reactive powers, which can be expressed as:
dt
dv
i
dt
di
v
dt
dv
i
dt
di
v
dt
dQ
dt
dv
i
dt
di
v
dt
dv
i
dt
di
v
dt
dP
α
β
β
α
β
α
α
β
β
β
β
β
α
α
α
α
−−+=
+++= (2)
Equation (3) shows the per phase dynamic behaviour of a
VSI with an inductive filter (Fig.2), with vK the converter’s
voltage, v the line-voltage and i the line-current.
v
d
t
di
LiRvK++= (3)
Neglecting the influence of the resistances of inductive
elements and using Clark’s transformation we get the
instantaneous current evolution law under static coordinates
(4).
()
()
ββ
β
αα
α
vv
Ldt
di
vv
Ldt
di
K
K
−≅
−≅
1
1
(4)
The line voltage variation is also required in (2).
Considering a non-perturbed line:
()
()
tVv
tVv
S
S
ω
ω
β
α
cos
sin
−=
=
(5)
We get the next instantaneous line-voltage variation law:
()
()
α
β
β
α
ωωω
ωωω
vtV
dt
dv
vtV
dt
dv
S
S
==
−==
sin
cos (6)
Replacing (4) and (6) in (2), the instantaneous active and
reactive power evolution functions are obtained.
()
()
()
()
+−+
−−=
−−+
+−=
βααβββαα
αββββααα
ωω
ωω
ivv
L
vvv
L
iv
dt
dQ
ivv
L
vivv
L
v
dt
dP
KK
KK
11
11
(7)
1662

Any given voltage at the output of the
VSI is kept constant during each voltage-vector application.
In the same way, if the switching frequency is high enough,
the line voltage can be also considered as a
constant value during the same period. Thus, and provided
that current variations are small, we can consider that active
and reactive power evolutions are kept at quasi-constant
values during each voltage-vector application. These
assumptions allow simple geometrical analysis of
concatenated power evolutions. We can define active and
reactive power-evolution slopes during a voltage vector
application as:
] [ T
kkk
βα
ννν
=
] T
βα
νν
[
ν
=
ik
ik
VV
qi
VV
pi
dt
dQ
f
dt
dP
f
=
=
=
=
(8)
With i denoting the position index of the applied voltage in
the sequence of voltage-vectors. This way we can compute
the evolution of active and reactive powers under a given
VSI voltage-vector application during the related application
time.
aiqiii
aipiii
tfQQ
tfPP
+=
+=
−
−
1
1 (9)
With {Pi-1 Qi-1} initial active and reactive power values in
the begining of the i-th vector of the sequence, tai the
application time and {Pi Qi} the active and reactive power
values at the end of the application time.
B. P-DPC based on a two voltage vectors sequence
This P-DPC version is based on the optimum
concatenation of two (9)-type trajectories along the control
period TSW. Fig. 3 shows an example containing a first steady
state control period followed by a reference transient
response. In the beginning of each period the control must
select two of the applicable voltage vectors, followed by the
computation of the required application times.
1) Switching Vector Selection: In this first approach we
propose the use of an active voltage-vector followed by a
null vector. It is desirable to reduce the number of
commutations and with it the power losses of
semiconductors. We can select the active vector by a look up
table derived from any DPC strategy [5,8,9], whereas the null
vector is chosen in such a way that only one switching action
occurs in each TSW period.
2) Application Times: Using equations (9) and constant
switching frequency condition we can write the set of
equations defining the overall evolution of active and
reactive powers during the control period (10), see Fig. 3.
R,L
vk v
i
VSI Line
L Filter
DC/AC
Fig. 2. One-phase model of a line-connected VSI
VDC
0
02120212
101101
/
/
ttT
tfQQtfPP
tfQQtfPP
asw
qp
aqap
+=
+=+=
+=
+
=
(10)
The control algorithm must compute the application time ta
in such a way that controlled variables evolve from their
initial values, {P0 Q0}, towards the reference values, {P2 Q2}.
This problem has five equations and three variables, so an
aproximative solution based on some optimization criteria
must be computed. We can try to minimize the active and
reactive power tracking errors, which are defined as:
()
()
aSWqaq
e
refFq
aSWpap
e
refFp
tTftfQQe
tTftfPPe
qo
po
−−−−=
−−−−=
210_
210_
48476
48476
(11)
Using a least-square optimisation method we try to
minimize the value of equation (12).
2
Fq
2
Fp ee F += (12)
The optimal time of switching [ta] that minimizes the
function F during a control period satisfies the minimum
value condition:
0
t
F
a
=
∂
∂ (13)
Solving this optimization problem the following
application times are obtained.
P_ref
P0(K)
t
K
t
K
+1
ta(K) t0(K) ta(K+1)
t0(K+1)
Q0(K)
Q_ref Q2(K)=Q0(K+1)
P2(K)=P0(K+1)
P
Q
P1(K)
P1(K+1)
Q1(K)
Q2(K+1)
fp1(K) fp2(K)
fp1(K+1)
fp2(K+1)
fq1(K)
fq2(K)
fq1(K+1)
fq2(K+1)
t0(K)=Tsw-ta(K) T
0(K+1)=Tsw-ta(K+1)
Fig. 3. Example of the steady state and transient behaviour of P-
DPC based on a two vectors sequence
1663

()
()
()()
()()
aSW
qqpp
qqqopppo
qqppSWpqSW
a
tTt
ffff
ffeffe
ffffTffT
t
−=
−+−
−⋅+−⋅+
⋅+⋅⋅++⋅−
−=
0
2
12
2
12
1212
1212
2
2
2
2
(14)
C. P-DPC Based on a three voltage vectors sequence
Fig.4 shows an example of the three-vector version of the
P-DPC in a first steady-state control period followed by an
reference transient.
1) Switching Vector Selection: The concatenation of three
voltage-vectors offers an additional degree of freedom that
can be used in order to reach complementary control
objectives. In this work we try to minimize the switching
losses following the idea of Minimum Loss Vector Pulse
Wide Modulation (MLV-PWM) [18]. The voltage vector
sequence is chosen in such a way that the switching of a VSI
leg does not happen during the line-current maximum,
leading to minimum switching losses (only two
commutations per TSW period).
The line-voltage plane is divided in six sectors of 60º, [θ1..
θ6], which are also divided in two subsectors, [θiA.. θiB], see
Fig.5. As the use of the nearest voltage-vectors provides the
smallest current riple, when the grid voltage is located at any
given sector, θi, the voltage application sequence must be
build by active voltage vectors belonging to the set
and by one of the two nul vectors,
{
11 ,, +− iii vvv rrr
}
{
}
70 ,vv
r
r
. In
the first sector case, for example, next two voltage
application sequences are possible.
[][
{}
7217611 ,,,,, vvvvvv rrrrrr
⇒
θ
]
(15)
The apropriate sequence will depend on the implied
subsector and the switching-losses optimization strategy, see
[18].
2) Application Times: The set of equations defining the
overall evolution of active and reactive powers during the
control period are:
321
33233323
22122212
11011101
/
/
/
aaasw
aqap
aqap
aqap
tttT
tfQQtfPP
tfQQtfPP
tfQQtfPP
++=
⋅+=⋅+=
⋅+=⋅+=
⋅+=⋅+=
(16)
With {P0 Q0} the initial power values and {P3 Q3} the
reference values. The new problem has seven equations and
six variables, so an aproximative solution based on a similar
optimization criteria of the previous case has been developed.
This way, next aplication times are obtained:
=
∂
∂
=
∂
∂
0
t
F
0
t
F
a2
a1 (17)
(
)
(
)
()
()( )
()
213
121331
322123
3113
3113
2
121331
322123
3223
2332
1
aaSWa
pqpqpq
pqpqpq
SWpqpq
qopppoqq
a
pqpqpq
pqpqpq
SWpqpq
qopppoqq
a
ttTt
ffffff
ffffff
Tffff
effeff
t
ffffff
ffffff
Tffff
effeff
t
−−=
⋅+⋅−⋅+
⋅−⋅−⋅
⋅⋅+⋅−+
⋅−+⋅−
=
⋅+⋅−⋅+
⋅−⋅−⋅
⋅⋅−⋅+
⋅−+⋅−
=
(18)
D. Proposed Control System Configuration
The control block diagram of the proposed P-DPC
technique is shown in Fig.6. Initial line voltage and current
values are used in order to compute initial active and reactive
powers [P0, Q0]. The proposed strategy evaluates this
information and the target power values, selects the
appropriate sequence and computes the application times
which minimize the final tracking errors.
P_ref
P0(K)
t
K
t
K
+1
ta1(K)
ta3(K)=Tsw-ta1(K)-ta1(K)
ta1(K+1)
Q0(K)
Q_ref
Q3(K)=Q0(K+1)
P3(K)=P0(K+1)
P
Q
P1(K)
P2(K)
P1(K+1)
P2(K+1)
Q1(K)
Q2(K)
Q1(K+1) Q2(K+1)
ta2(K)
ta3(K+1)=Tsw-ta1(K+1)-ta2(K+1)
ta2(K+1)
ta3(K) ta3(K+1)
fp1(K)
fp2(K)
fp3(K)
fp1(K+1)
fp2(K+1) fp3(K+1)
fq1(K)
fq2(K)
fq3(K)
fq1(K+1)
fq2(K+1)
fq3(K+1)
Fig. 4. Example of the steady state and transient behaviour of P-
DPC based on a three vectors sequence
v1 (1,0,0)
v2 (1,1,0)
v3 (0,1,0)
v4 (0,1,1)
v6 (1,0,1)
v5 (0,0,1)
v7 (1,1,1)
v0 (0,0,0)
α
β
θ1B
θ2A
θ2B
θ3A
θ3B
θ4A
θ4B
θ5A θ5B θ6A
θ6B
θ1A
Fig. 5. Relation between the voltage vectors of a three phase
converter and the grid period division
1664

TABLE I
SPECIFICATIONS OF THE GRID CONNECTED THREE PHASE VSI
Value [unit]
Rated Power 500 [kVA] cosφ=0.9(i)
Rated line-to-line Voltage 690 [V]
Filter (L) 1.2 [mH]
DC Link (CDC) 20mF/1200 [V]
Control Period TSW 500 [µs]
DC/AC
Converter
VDC
Q_ref
va
vb
vc
ika
ikb
ikc
L
L
L
vka
vkb
vkc
VDC
_
ref
P_ref
Sa S
b
Sc
Minimization
Criteria
Active & Reactive
Power Calculation
vα vβ
α
β
abc
α
β
abc
iα iβ
Qo
fp1-2-3
VDC Voltage
Regulation
D
irec
t
Clark’s
Transformation
iDC
fq1-2-3
P
o
Converter
Vector
Preselection
Power
Predictive
Model
0.45 0.455 0.46 0.465 0.47 0.475 0. 48 0.485 0.49 0.495 0.5
-1
-0.5
0
0.5
1
VOC with SV-PWM
Phase 1
0.45 0.455 0.46 0.465 0.47 0.475 0. 48 0.485 0.49 0.495 0.5
-1
-0.5
0
0.5
1
VOC with MLV-PWM
Phase 1
0.45 0.455 0.46 0.465 0.47 0.475 0. 48 0.485 0.49 0.495 0.5
-1
-0.5
0
0.5
1
P-DPC
Phase 1
Time (s)
Switching Signals
Phase Current
Phase Voltage
P-DPC
Strategy
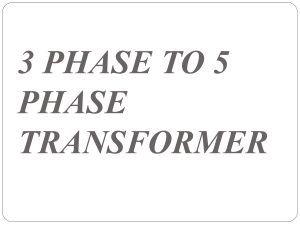
Fig. 6. Block diagram of P-DPC Fig. 7. Phase switching signals along with the current and voltage
IV. SIMULATION RESULTS
In order to verify the behaviour of the proposed control
algorithm comparative simulations involving VOC with SV-
PWM, MLV-PWM and three-vector type P-DPC strategies
have been carried out. The specifications and parameters of
the simulated model are listed in Table I. Fig. 7 shows the
resulting per-phase switching signals and normalized per-
phase current and voltage (superposed). It can be observed
that in MLV-PWM and P-DPC cases there are not switching
actions along the maximum of the line-current. But
improvement in power-losses is related to current-spectrum
deterioration, see comparative in Fig. 8. The VOC-type SV-
PWM strategy shows the best power quality (THDi=2.78%),
follower by the VOC-based MLV-PWM (THDi=3.38%) and
finally, the P-DPC shows the worst current-quality
(THDi=4.59%). It is an expected result as far as part of the
degrees of freedom is not used in current control tasks.
Nevertheless all strategies meet the IEEE Std 519-1992
recommendation.
Detailed evolutions of variables under P-DPC are shown in
Fig.9. Three control periods are represented. As it can be
observed, quasi-linear active and reactive power trajectories
evolve around the reference values, with a ripple of around
5%.
But the best P-DPC results are obtained, as expected, in
transient behaviour, see Fig. 10. Two steps of active and
reactive power references from zero to 500kW and 218kVAr
have been applied. Though the reactive power transients are
similar in all the cases, the P-DPC is clearly faster in active
power tracking task, as it takes only 3ms face to the 60ms
required by any of the two VOC strategies.
V. CONCLUSIONS
A new predictive-type direct power control strategy (P-
DPC) is proposed. Thanks to this new approach constant
switching frequency operation is obtained keeping the fast
dynamic response related to direct control strategies.
01000 2000 3000 4000 5000 6000 7000 8000 9000 10000
0
0.01
0.02
0.03
0.04
X= 50
Y= 1
X= 1900
Y = 0.014073
X= 39 5 0
Y= 0.0061322 X= 5 90 0
Y= 0.00106
VOC with SV-PWM
01000 2000 3000 4000 5000 6000 7000 8000 9000 10000
0
0.01
0.02
0.03
0.04
X= 50
Y= 1
X= 19 0 0
Y= 0.013513 X= 39 5 0
Y= 0.0072834 X= 5 90 0
Y= 0.0025241
VOC with MLV-PWM
Mag (% of 50Hz Component)
01000 2000 3000 4000 5000 6000 7000 8000 9000 10000
0
0.01
0.02
0.03
0.04
X= 5950
Y= 0.0023607
X= 50
Y= 1
X= 39 5 0
Y= 0.0070852
X= 1950
Y = 0.032323
P-DPC
Frequency ( Hz)
Fundamental (50Hz) = 591.664 A
THD i = 2.78%
Fundamental (50Hz) = 591.664 A
THDi = 3.38%
Fundamental (50Hz) = 591.664 A
THDi = 4.59%
Fig. 8. Current frequency spectrum
0.3 0.3005 0.301 0.3015
0
0.5
1
Switching Signals
0.3 0.3005 0.301 0.3015
0.9
0.95
1
1.05
1.1
P [p.u]
0.3 0.3005 0.301 0.3015
-0.1
-0.05
0
0.05
0.1
Q [p.u]
Time (s)
Reactive Power
Power Re ferenc e
Acti ve Power
Power Reference
Phase 1
Phase 2
Phase 3
Fig. 9. Power variations with respect to the switching signals
1665
 6
6
1
/
6
100%