TSI 1 Cours de STATIQUE page 1
STATIQUE :
MODELISATION des ACTIONS MECANIQUES
La statique est l’étude mécanique des solides ou de systèmes de solides au repos liés et étudiés dans un repère considéré
comme galiléen.
La résistance des Matériaux fournira, par la suite, des méthodes rationnelles de dimensionnement des liaisons et des pièces
mécaniques soumises à un ensemble d’actions mécaniques. Pour utiliser ces méthodes il faut connaître ou avoir déterminé
par des études de statique les efforts que supportent ou que transmettent les différentes pièces du mécanisme étudié.
Le but de ce chapitre est de choisir une représentation mathématique des actions mécaniques.
1— Définition d’un système matériel :
Définition : On appelle système matériel une quantité de matière, homogène ou non, dont la masse reste constante
d pendant son étude.
Exemples : un solide : bride, levier, bielle, axe, pignon, ressort
un ensemble de solides : vérin, moteur, automobile, avion, homme, machine
une portion de solide, portion de levier, de poutre, délimitée par une coupure fictive et isolée par la pensée : d
d partie de poutre située à gauche d’une section droite .. . .
d un fluide; masse de carburant, huile contenue dans le corps d’un vérin
Remarque: C’est une notion très large et très conventionnelle
En statique:
Les seuls systèmes matériels que nous aurons à considérer seront:
— un solide considéré comme indéformable
— un ensemble de solides liés dont on considérera la forme globale indéformable
— un solide déformable, mais dont la loi de déformation est connue ; en général un ressort
— un lien flexible tendu qui sera modélisé non déformable dans cette utilisation
Système matériel isolé : Lorsqu’un système matériel (S) est bien défini, on est capable de discerner tous les éléments de
ce système du reste de son environnement. On peut l’isoler fictivement, tout ou partie par la pensée, ou même y faire
une coupe fictive et en prélever une partie ; par exemple pour en étudier son équilibre.
Le choix judicieux du système à
isoler est déterminant pour la résolution d’un problème de mécanique
2— Actions mécaniques :
2-1 Définition : On appelle Action Mécanique, toute cause susceptible de maintenir un solide au repos, ou de le mettre en
d mouvement, ou de modifier son mouvement, ou de déformer le solide étudié.
Exemples : action d’un palier sur un arbre,
action du sol sur les pieds d’une table,
action de la terre sur tous les solides,
action de l’eau sur une coque,
action de l’air sur une aile d’avion,
action d’un aimant sur une pièce magnétique.
2-2 Classifications des actions :
- Suivant leur nature physique:
Actions mécaniques à distance:● champ ou effet de la
d pesanteur ;
d ● champ électromagnétique ;
d ● effets électriques ou
d électrostatiques.
Actions mécaniques de contact : d’un solide, d’un fluide ou d’un élément élastique.
Dans ce cas de contact, la liaison technologique associée possède souvent des formes de contact surfaciques, mais elle
sera souvent assimilée pour simplifier la modélisation, si l’hypothèse est raisonnable, à une ligne ou à un point.
(Voir les
exemples, modélisations simplificatrices et commentaires qui suivent).

TSI 1 Cours de STATIQUE page 2
- Suivant leur situation par rapport au système matériel :
Actions mécaniques extérieures au système matériel isolé.
Actions mécaniques internes au système matériel isolé.
Exemple:
L’action mécanique de 3 sur 2 est à S -
L’action mécanique de 1 sur 2 est à S - L’action mécanique de 1 sur 2 est à 2 -
En statique, on ne considère que les actions mécaniques extérieures aux systèmes matériels isolés. Cette dernière
classification est donc très importante.
3— Premier principe de la statique : toute action mécanique peut être caractérisée par un torseur.
3-1 Notion de Force : Cette force génère ou interdit un mouvement selon une droite support ; on représentera générale-
ment une force par un vecteur glisseur défini par : — sa direction (∆) : ∆
F
,
D — son sens,
D — sa norme (intensité ou module) ║
F
║, dont l’unité est le (N).
Des actions mécaniques seront représentées par un pointeur (vecteur lié ; glisseur dont le support
doit passer par un point donné). Ainsi l’action mécanique du fil sur le système (S) se caractérise
par un pointeur (P,
F
), mais on peut aussi la caractériser en tous les points du fil par un glisseur.
Définition : Une force est une action mécanique représentée par un pointeur (vecteur lié) ou par un glisseur.
Autre définition: c’est l’action mécanique d’un point matériel sur un autre point matériel.
Unité de mesure d’intensité d’une force: le Newton (N) en SI, mais cette quantité est faible, on utilise souvent le daN ou le kN.

TSI 1 Cours de STATIQUE page 3
Remarques importantes
a) Force appliquée à un système rigide : Le phénomène ne change pas si l’on change le point d’application de
F
F
peut être considéré comme un glisseur.
b) Force appliquée à un système déformable :
On constate une déformation différente de la poutre
(1) selon (A,
1→F
) ou (B,
1→F
); le modèle
du pointeur s’impose alors ici.
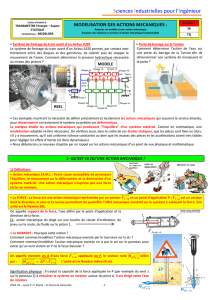
3-1-1 Il faut mémoriser que très souvent la notion de “Force” seule est insuffisante pour représenter complètement bon
nombre d’actions mécaniques.
Modèle: Poids de 2 négligé par rapport à l’action du ressort
L’action mécanique de 1 sur 2 dépend de l’orientation de
F
caracté-
risée par l’angle α, et aussi de la position du point d’application de
F
. On introduit alors
Mc
(P,
F
) pour compléter la caractérisation
de l’action de 1 sur 2 . C peut être un point quelconque.
L’action mécanique du ressort sur la poutre Résultante d’action
peut être caractérisé par : Moment en C de l’action
3-2 Généralisation :
Rappel sur le MOMENT d’une Force par rapport à un point fixe dans un repère Galiléen
Modélisation de l’ACTION mécanique d’une FORCE appliquée à un solide
Attention
:
ce ne sont pas 2 actions
différentes ; mais 2 modélisations
des actions de la
Même Force
, en 2
points différents.

TSI 1 Cours de STATIQUE page 4
Modélisation d’un système de Forces appliquées sur un Solide ou sur un Système Isolé
Généralisation à la modélisation des actions d’un système sur un autre
Si un système matériel (S) subit de la part d’un système matériel (E) une action mécanique représentée par un système de n
forces (Pi,
i
F
), on caractérise globalement cette action mécanique globale par les deux vecteurs suivants
Appelée résultante générale de l’action
d mécanique de(E) sur (S)
Appelée moment résultant au point A de
d l’action mécanique de (E) sur (S)
On dit alors que l’action mécanique de (E) sur (S) est caractérisée
au point A par les deux vecteurs, ou a un effet équivalent à celui des deux vecteurs :
Comme le moment résultant vérifie la relation de changement de point du moment d’un torseur
Le champ des moments résultants d’une action mécanique est donc le champ des moments d’un torseur. D’où :
Premier Principe de la Statique
Toute action Mécanique est entièrement caractérisée, d’un point de vue mathématique et mécanique, par un Torseur.
est appelé torseur d’action mécanique de (E) sur (S)
ou (torseur statique).
est appelée résultante générale du torseur d’action
mécanique de (E) sur (S)
est appelé moment résultant au point A du torseur
d’action mécanique de (E) sur (S).
Remarque Importante: Un abus de langage fréquent conduit à appeler force le vecteur . Le fait que le torseur
d’action mécanique se limite souvent à un glisseur (torseur glisseur à moment nul le long de son axe central imposé),
contribue à entretenir cette confusion.
On confond aussi souvent l’action mécanique (phénomène physique) avec sa représentation mathématique : un système de
pointeurs ou de glisseurs représentable en n’importe quel point de l’espace par un Torseur. (Mais les effets ne sont pas les
mêmes, par exemple un résultat nul en mathématique peut signifier en mécanique un système à l’équilibre ; mais chargé et
contraint ou sous pression).
Et ce torseur général est lui-même la somme d’un torseur couple et d’un torseur glisseur.
4— Propriétés et représentations particulières du torseur d’action mécanique
● Toutes les propriétés des torseurs sont applicables.
● Certaines seront en particulier intéressantes pour caractériser des actions mécaniques équivalentes.
● Ces formes particulières de torseurs correspondent aussi à des cas typiques d’actions mécaniques.

TSI 1 Cours de STATIQUE page 5
4-1 Ex 1 : Soit (1), qui subit de la part de (E) : une action mécanique représentée par 2 forces
Déterminer pour ce système : l’axe central et le moment central de (Torseur équivalent).
On peut dire que l’action mécanique des 2 forces est équivalente à la résultante appliquées en tout point de
∆ ( ∆ axe central du torseur ) ; mais ici il faut déterminer et faire apparaître le moment central non nul.
4-2 Ex 2 : Le tire-bouchon (1) subit de la main (M) une action matérialisée par :
Action :
Déterminer l’axe central et le moment central de (torseur équivalent).
4-3 Remarques importantes:
— En général le torseur d’action mécanique représentant n forces parallèles est un Torseur glisseur (ou Torseur à
d “ résultante” )
d — En général le torseur d’action mécanique représentant n forces coplanaires est un Torseur glisseur.
Cas particuliers possibles : Torseur nul ; Torseur couple.
( Il faudra s’assurer que les torseurs glisseurs sont bien représentés par leur Résultante portée par leur axe central ).
5— Modélisation des Actions Mécaniques à Distance :
5-1 Définition : Une action mécanique de (1) sur (2) sera dite à distance si elle ne résulte pas d’une liaison mécanique
entre (1) et (2). Ces actions sont innombrables :
— celles inconnues : On ne connaît pas encore tous les éléments de l’univers
.
d — celles connues : Phénomènes naturels de gravitation:
d - objets de l’entourage : négligée.
d - soleil, mercure, mars, négligée.
d - lune : négligée sauf pour l’étude des marées et la météo.
d - terre : non négligée à priori.
d Phénomènes naturels de l’électromagnétisme : négligée
d Phénomènes artificiels de l’électromagnétisme : non négligé à priori
Pratiquement : Dans les exemples qui seront traités ; on ne fait intervenir que la terre, un socle ou bâti lié à la terre et sur
lequel sera fixé le mécanisme à étudier. En général pour chaque système isolé on ne se servira que d’un ensemble restreint
des actions mécaniques que reçoit l’ensemble étudié. Ces actions seront majoritairement des actions de contact; celles du
bâti avec la terre resteront souvent inconnues dans le détail et les actions à distance de pesanteur seront souvent négligées
en première approche, car leur intensité sera faible en regard d’autres intensités d’actions mises en jeu en d’autres points.
Chargement
mécanique équivalent
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%