DYN1 - TSI Ljf.html

DYN Dynamique DYN-1 PFD
Lycée Jules Ferry
Page 1 sur 5
TSI2
Cours DYN-1 : Principe fondamental de la dynamique
(mouvement particuliers de rotation et translation)
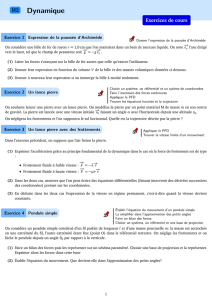
Un cahier des charges ou un descriptif du système étant défini, les problèmes de dynamique sont de 3
types :
- dimensionner un actionneur permettant d'assurer les performances attendues,
- établir ou valider la loi de commande d'un actionneur,
- déterminer les actions de liaisons afin de valider la tenue des guidages (éventuellement la tenue
des pièces aux actions dynamiques).
Dans ce cours, on se limitera aux cas particuliers usuels (rotation d'axe fixe, translation rectiligne).
1 Hypothèses pour un problème de dynamique
1.1 Référentiel géométrique
Référentiel galiléen terrestre :
Le référentiel d'étude galiléen habituel lors de l'étude de systèmes mécaniques est le référentiel
terrestre ou tout référentiel en translation rectiligne uniforme
par rapport au
référentiel terrestre.
Limites du référentiel terrestre comme référentiel galiléen :
Ce référentiel est satisfaisant pour les études sur de courtes durées (les déplacements étudiés ont des durées
négligeables par rapport au temps de révolution terrestre, contrairement à un pendule de Foucault dont la
déviation s'observe après plusieurs heures).
Les déplacements observés se font sur des distances négligeables devant les dimensions terrestres (milliers
de kilomètres).
Dans le cas, fort improbable en sujet de concours, où le référentiel terrestre ne fournit pas un référentiel
satisfaisant, un autre référentiel sera défini (référentiel astronomique prenant en compte la rotation de la terre
sur elle-même ou autour du soleil).
1.2 Référentiel temporel
Le temps sera celui donné par les horloges usuelles (oscillatoire ou nucléaire).
Limites de la mesure du temps par les horloges oscillatoires :
Les vitesses relatives des mouvements observés doivent être négligeables devant la vitesse de la lumière
(dans le vide c=3.10
8
m/s=300 000 km/s).
Compétences nécessaires (Prérequis):
B2 Associer un modèle à une action mécanique,
B2 Associer aux liaisons un torseur cinématique,
B2 Paramétrer les mouvements d’un solide indéformable,
C2 Procéder à la mise en œuvre d'une démarche de résolution analytique
C2 Déterminer la loi entrée-sortie d’une chaîne cinématique simple
C2 Déterminer le vecteur vitesse d’un point d’un solide par rapport à un autre,
C2 Déterminer le vecteur accélération d’un point d’un solide par rapport à un autre
Compétences nouvelles:
B2 Déterminer les caractéristiques d’un solide indéformable (torseur cinétique),
C1 Proposer une démarche permettant de déterminer une loi de mouvement,
C1 Proposer une méthode permettant la détermination des inconnues de liaison

DYN Dynamique DYN-1 PFD
Lycée Jules Ferry
Page 2 sur 5
TSI2
1.3 Masses
Les systèmes étudiés seront généralement (pour ne pas dire tout le temps) à masse conservative (c'est-à-
dire à masse constante au cours du temps).
Limite du modèle de masse constante:
Certains phénomènes ne peuvent pas être expliqués si la masse est constante (propulsion par
réaction : fusée, ballon de baudruche se dégonflant). Il faudra alors revenir à la conservation de la quantité
de mouvement (hors programme S2I).
La masse de carburant par ailleurs peut ne pas être négligeable. On fait alors en général un
dimensionnement dans le cas le plus défavorable (voir dans les 2 cas : réservoir vide ou réservoir plein).
1.4 Liaisons mécaniques
Les liaisons mécaniques seront presque toujours modélisées par des liaisons parfaites :
• géométries parfaites et non déformables,
• pas de jeu,
• pas de frottement.
Limites du modèle de liaison parfaite :
• frottement : certains problèmes ne peuvent s'expliquer que par la présence de frottement (arc-
boutement, voiture stationnée en pente, irréversibilité).
Un autre modèle souvent proposé et le frottement de Coulomb (modèle supposant que le frottement
ne dépend que des matériaux en contact et de l'intensité de la résultante normale au contact),
• pertes par effet Joule : les pertes pas frottement peuvent ne pas être négligeables, on modélise
alors ces pertes par un rendement η (rapport de la puissance disponible en sortie sur la puissance
fournie en entrée).
• jeux : de la même façon le jeu dans les liaisons est nécessaire à l'apparition de certains
phénomènes (comme certains arc-boutements). En général, les jeux éventuels sont pris en compte
directement dans le choix de liaisons parfaites autorisant ces déplacements (liaison linéaire
annulaire pour un roulement à billes, contacts ponctuels dans l'arc-boutement d'une liaison
glissière,….),
• déformation : les déformations dans les guidages pourront être modélisées par un modèle de
répartition de la pression de contact sinusoïdale (en géométrie parfaite non déformable la répartition
des pressions de contact est uniforme).
Rappel : représentations graphiques utiles pour la définition des actions mécaniques:
• graphe de liaisons (ou graphe de structure),
• schéma cinématique minimal ou schéma d'architecture.

DYN Dynamique DYN-1 PFD
Lycée Jules Ferry
Page 3 sur 5
TSI2
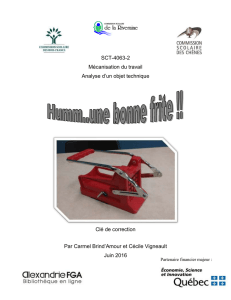
1.5 Loi cinématique
La loi de commande cinématique la plus fréquente est une loi en trapèze
de vitesse :
Accélération (phase d'accélération ou de décélération):
-
pour un solide en translation
(en m/s²) accélération galiléenne du point G liés au solide S,
(en m/s) variation de la vitesse galiléenne du point G liés au solide S,
(en s) durée de la phase de variation uniforme de la vitesse (ici ta ou td).
-
pour un solide en rotation :
(en rad/s²) dérivée de la vitesse de rotation galiléenne du solide S,
(en rad/s) variation de la vitesse galiléenne du solide S,
(en s) durée de la phase de variation uniforme de la vitesse (ici ta ou td).
Position s'obtient à partir de l'aire sous la courbe de la vitesse (interprétation graphique de l'intégration) :
-
pour un solide en translation rectiligne de direction :
!
"
!
#
x (en m) déplacement linéaire,
Vmax (en m/s) vitesse linéaire maximum,
t (en s) durée totale du mouvement,
ta (en s) durée d'accélération,
td (en s) durée de décélération.
-
pour un solide en rotation :
$%
!
"
!
#
θ (en rad) déplacement angulaire,
&'(
(en rad/s) vitesse de rotation maximum,
t (en s) durée totale du mouvement,
ta (en s) durée d'accélération,
td (en s) durée de décélération.
2 Torseur dynamique
Le torseur dynamique traduit les quantités d'accélération d'un système S (ensemble de solides) en
mouvement par rapport à un référentiel R.
)*
+
,
-.
/
0
1
23
4
,
/ 56
7
0
1
238
,
où •
0
: accélération du point M de S par rapport à R (en m/s²),
• .
: résultante dynamique du système S par rapport au référentiel R (en N) pour des
systèmes à masse conservative (où m
S
est la masse de S et G son centre de gravité). La
résultante dynamique peut se noter 5
mais pour éviter les confusions avec l'accélération
0
on utilise plutôt son expression .
.
• dm : masse élémentaire de S centrée sur le point M (en Kg),
• 4
,
: moment dynamique en A du système S par rapport au référentiel R (en N.m).
ta
td
t

DYN Dynamique DYN-1 PFD
Lycée Jules Ferry
Page 4 sur 5
TSI2
2.1 Résultante dynamique
La résultante dynamique s'obtient par dérivation du vecteur vitesse (ou/et du vecteur position) du centre de
gravité G du système.
9
9
:"
" ;
9
<"
!
=
"
!
>
où O est un point fixe dans le repère R (cas d'un système à masse conservative).
2.2 Moment dynamique
Le moment dynamique peut s'obtenir par la formule du changement de point de Varignon :
4
,
4
?
@5A
73
1
Le moment dynamique dépend du mouvement du système :
- solide en rotation d'axe fixe (A,)
B
C
D
C
%
,
E
,(
(en kg.m²) est le moment d'inertie autour de l'axe (A,) du solide étudié,
(en rad/s²) est la dérivée de la vitesse de rotation galiléenne du solide S
- solide en translation :
B
F
3 Enoncé du principe fondamental de la dynamique (PFD)
Soit un système S (ensemble de solides) en mouvement par rapport à un référentiel R galiléen, alors le
torseur dynamique de S est égale au torseur des actions mécaniques extérieures agissant sur le système:
)G
+
H
IJ
KLMK
N
H
ou encore O9
B
C
P
C
O
KLMK
Q
CKLMK
P
C
où )G
+
H
est le torseur dynamique de S au point A observé par rapport au référentiel R,
IJ
KLMK
N
H
est le torseur résultant des actions extérieures à S sur S en A.
ATTENTION : Les éléments de réduction des différents torseurs doivent être exprimés au même point.
Le principe fondamental de la dynamique se décline en 2 théorèmes lorsqu'on l'écrit pour chaque élément
de réduction des torseurs:
- théorème de la résultante dynamique,
- théorème du moment dynamique.
3.1 Théorème de la résultante dynamique
Soit un système S (ensemble de solides) en mouvement par rapport à un référentiel R galiléen, alors la
résultante dynamique de S est égale à la résultante des actions mécaniques extérieures agissant sur le
système:
9
KLMK
avec .
: masse du système S en kg
: accélération du centre de masse du système S (en m.s
-2
),
R
1SM1
: résultante des actions mécaniques extérieures à S (en N).
3.2 Théorème du moment dynamique
Soit un système S (ensemble de solides) en mouvement par rapport à un référentiel R galiléen, alors le
moment dynamique de S est égale au moment des actions mécaniques extérieures agissant sur le
système:
B
C
Q
CKLMK
avec 4
,
: moment dynamique en A (en N.m),
6
,1SM1
: moment des actions mécaniques extérieures à S en A (en N.m).

DYN Dynamique DYN-1 PFD
Lycée Jules Ferry
Page 5 sur 5
TSI2
3.3 Applications du principe fondamental de la dynamique
3.3.1 Dimensionnement et loi de commande de l'actionneur:
La relation permettant le dimensionnement du moteur s'obtient par projection des équations vectorielles du
PFD sur l'axe de mobilité de l'actionneur.
D'autres projections peuvent être nécessaire pour éliminer des inconnues de liaisons éventuelles (cas
notamment de liaisons avec frottement de Coulomb).
Cela conduit à l'équation directement obtenue par le théorème de l'énergie cinétique.
3.3.2 Actions de liaisons.
Les inconnues de liaisons s'obtiennent par projection judicieuse des équations vectorielles du PFD, en
général selon les directions des inconnues cherchées.
Références :
"Mécanique du solide: Application industrielles" de P.Agati, Y.Bremont, G.Delville. Edition Dunod.
"Sciences industrielles pour l'ingénieur : mécanique et automatique PSI" de R.Papanicola. Edition Ellipses.
"Mécanique des systèmes et des milieux indéformables" de L.Chevalier. Edition Ellipses
1
/
5
100%